Goal:
- Setup inputs for batch-RL model
- Implement Fitted Q-Iteration
import numpy as np
import pandas as pd
from scipy.stats import norm
import random
import sys
sys.path.append("..")
import grading
import time
import matplotlib.pyplot as plt
### ONLY FOR GRADING. DO NOT EDIT ###
submissions=dict()
assignment_key="0jn7tioiEeiBAA49aGvLAg"
all_parts=["wrZFS","yqg6m","KY5p8","BsRWi","pWxky"]
### ONLY FOR GRADING. DO NOT EDIT ###
COURSERA_TOKEN = 'jLCcoh3BbMO5hsCc' # the key provided to the Student under his/her email on submission page
COURSERA_EMAIL = 'bai_liping@outlook.com'# the email
Parameters for MC simulation of stock prices
S0 = 100 # initial stock price
mu = 0.05 # drift
sigma = 0.15 # volatility
r = 0.03 # risk-free rate
M = 1 # maturity
T = 6 # number of time steps
N_MC = 10000 # 10000 # 50000 # number of paths
delta_t = M / T # time interval
gamma = np.exp(- r * delta_t) # discount factor
Black-Sholes Simulation
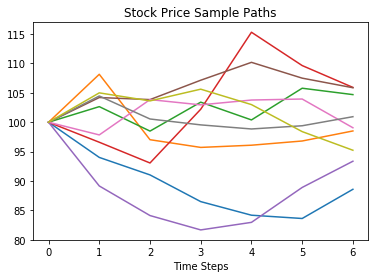
Simulate \(N_{MC}\) stock price sample paths with \(T\) steps by the classical Black-Sholes formula.
\[dS_t=\mu S_tdt+\sigma S_tdW_t\quad\quad S_{t+1}=S_te^{\left(\mu-\frac{1}{2}\sigma^2\right)\Delta t+\sigma\sqrt{\Delta t}Z}\]where \(Z\) is a standard normal random variable.
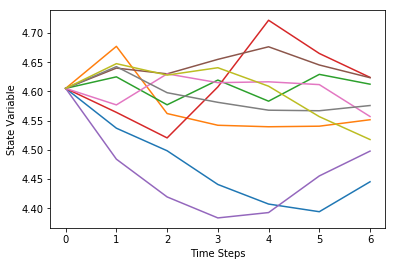
Based on simulated stock price \(S_t\) paths, compute state variable \(X_t\) by the following relation.
\[X_t=-\left(\mu-\frac{1}{2}\sigma^2\right)t\Delta t+\log S_t\]Also compute
\[\Delta S_t=S_{t+1}-e^{r\Delta t}S_t\quad\quad \Delta\hat{S}_t=\Delta S_t-\Delta\bar{S}_t\quad\quad t=0,...,T-1\]where \(\Delta\bar{S}_t\) is the sample mean of all values of \(\Delta S_t\).
Plots of 5 stock price \(S_t\) and state variable \(X_t\) paths are shown below.
# make a dataset
starttime = time.time()
np.random.seed(42) # Fix random seed
# stock price
S = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
S.loc[:,0] = S0
# standard normal random numbers
RN = pd.DataFrame(np.random.randn(N_MC,T), index=range(1, N_MC+1), columns=range(1, T+1))
for t in range(1, T+1):
S.loc[:,t] = S.loc[:,t-1] * np.exp((mu - 1/2 * sigma**2) * delta_t + sigma * np.sqrt(delta_t) * RN.loc[:,t])
delta_S = S.loc[:,1:T].values - np.exp(r * delta_t) * S.loc[:,0:T-1]
delta_S_hat = delta_S.apply(lambda x: x - np.mean(x), axis=0)
# state variable
X = - (mu - 1/2 * sigma**2) * np.arange(T+1) * delta_t + np.log(S) # delta_t here is due to their conventions
endtime = time.time()
print('\nTime Cost:', endtime - starttime, 'seconds')
# plot 10 paths
step_size = N_MC // 10
idx_plot = np.arange(step_size, N_MC, step_size)
plt.plot(S.T.iloc[:, idx_plot])
plt.xlabel('Time Steps')
plt.title('Stock Price Sample Paths')
plt.show()
plt.plot(X.T.iloc[:, idx_plot])
plt.xlabel('Time Steps')
plt.ylabel('State Variable')
plt.show()
Time Cost: 0.0767676830291748 second
Define function terminal_payoff to compute the terminal payoff of a European put option.
\[H_T\left(S_T\right)=\max\left(K-S_T,0\right)\]def terminal_payoff(ST, K):
# ST final stock price
# K strike
payoff = max(K-ST, 0)
return payoff
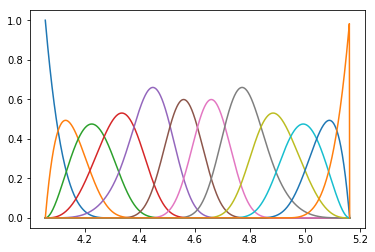
Define spline basis functions
import bspline
import bspline.splinelab as splinelab
X_min = np.min(np.min(X))
X_max = np.max(np.max(X))
print('X.shape = ', X.shape)
print('X_min, X_max = ', X_min, X_max)
p = 4 # order of spline (as-is; 3 = cubic, 4: B-spline?)
ncolloc = 12
tau = np.linspace(X_min,X_max,ncolloc) # These are the sites to which we would like to interpolate
# k is a knot vector that adds endpoints repeats as appropriate for a spline of order p
# To get meaninful results, one should have ncolloc >= p+1
k = splinelab.aptknt(tau, p)
# Spline basis of order p on knots k
basis = bspline.Bspline(k, p)
f = plt.figure()
# B = bspline.Bspline(k, p) # Spline basis functions
print('Number of points k = ', len(k))
basis.plot()
plt.savefig('Basis_functions.png', dpi=600)
X.shape = (10000, 7)
X_min, X_max = 4.05752797076 5.16206652917
Number of points k = 17
type(basis)
bspline.bspline.Bspline
X.values.shape
(10000, 7)
Make data matrices with feature values
“Features” here are the values of basis functions at data points The outputs are 3D arrays of dimensions num_tSteps x num_MC x num_basis
num_t_steps = T + 1
num_basis = ncolloc # len(k) #
data_mat_t = np.zeros((num_t_steps, N_MC,num_basis ))
print('num_basis = ', num_basis)
print('dim data_mat_t = ', data_mat_t.shape)
# fill it, expand function in finite dimensional space
# in neural network the basis is the neural network itself
t_0 = time.time()
for i in np.arange(num_t_steps):
x = X.values[:,i]
data_mat_t[i,:,:] = np.array([ basis(el) for el in x ])
t_end = time.time()
print('Computational time:', t_end - t_0, 'seconds')
num_basis = 12
dim data_mat_t = (7, 10000, 12)
Computational time: 13.818428993225098 seconds
# save these data matrices for future re-use
np.save('data_mat_m=r_A_%d' % N_MC, data_mat_t)
print(data_mat_t.shape) # shape num_steps x N_MC x num_basis
print(len(k))
(7, 10000, 12)
17
Dynamic Programming solution for QLBS
The MDP problem in this case is to solve the following Bellman optimality equation for the action-value function.
\[Q_t^\star\left(x,a\right)=\mathbb{E}_t\left[R_t\left(X_t,a_t,X_{t+1}\right)+\gamma\max_{a_{t+1}\in\mathcal{A}}Q_{t+1}^\star\left(X_{t+1},a_{t+1}\right)\space|\space X_t=x,a_t=a\right],\space\space t=0,...,T-1,\quad\gamma=e^{-r\Delta t}\]where \(R_t\left(X_t,a_t,X_{t+1}\right)\) is the one-step time-dependent random reward and \(a_t\left(X_t\right)\) is the action (hedge).
Detailed steps of solving this equation by Dynamic Programming are illustrated below.
With this set of basis functions \(\left\{\Phi_n\left(X_t^k\right)\right\}_{n=1}^N\), expand the optimal action (hedge) \(a_t^\star\left(X_t\right)\) and optimal Q-function \(Q_t^\star\left(X_t,a_t^\star\right)\) in basis functions with time-dependent coefficients. \(a_t^\star\left(X_t\right)=\sum_n^N{\phi_{nt}\Phi_n\left(X_t\right)}\quad\quad Q_t^\star\left(X_t,a_t^\star\right)=\sum_n^N{\omega_{nt}\Phi_n\left(X_t\right)}\)
Coefficients \(\phi_{nt}\) and \(\omega_{nt}\) are computed recursively backward in time for \(t=T−1,...,0\).
Coefficients for expansions of the optimal action \(a_t^\star\left(X_t\right)\) are solved by
\[\phi_t=\mathbf A_t^{-1}\mathbf B_t\]where \(\mathbf A_t\) and \(\mathbf B_t\) are matrix and vector respectively with elements given by
\[A_{nm}^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Phi_n\left(X_t^k\right)\Phi_m\left(X_t^k\right)\left(\Delta\hat{S}_t^k\right)^2}\quad\quad B_n^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Phi_n\left(X_t^k\right)\left[\hat\Pi_{t+1}^k\Delta\hat{S}_t^k+\frac{1}{2\gamma\lambda}\Delta S_t^k\right]}\]Define function function_A and function_B to compute the value of matrix \(\mathbf A_t\) and vector \(\mathbf B_t\).
Define the option strike and risk aversion parameter
risk_lambda = 0.001 # 0.001 # 0.0001 # risk aversion
K = 100 #
# Note that we set coef=0 below in function function_B_vec. This correspond to a pure risk-based hedging
Part 1: Implement functions to compute optimal hedges
Instructions: Copy-paste implementations from the previous assignment, i.e. QLBS as these are the same functions
# functions to compute optimal hedges
def function_A_vec(t, delta_S_hat, data_mat, reg_param):
"""
function_A_vec - compute the matrix A_{nm} from Eq. (52) (with a regularization!)
Eq. (52) in QLBS Q-Learner in the Black-Scholes-Merton article
Arguments:
t - time index, a scalar, an index into time axis of data_mat
delta_S_hat - pandas.DataFrame of dimension N_MC x T
data_mat - pandas.DataFrame of dimension T x N_MC x num_basis
reg_param - a scalar, regularization parameter
Return:
- np.array, i.e. matrix A_{nm} of dimension num_basis x num_basis
"""
### START CODE HERE ### (≈ 5-6 lines of code)
# A_mat = your code goes here ...
X_mat = data_mat[t, :, :]
num_basis_funcs = X_mat.shape[1]
this_dS = delta_S_hat.loc[:, t]
hat_dS2 = (this_dS ** 2).reshape(-1, 1)
A_mat = np.dot(X_mat.T, X_mat * hat_dS2) + reg_param * np.eye(num_basis_funcs)
### END CODE HERE ###
return A_mat
def function_B_vec(t,
Pi_hat,
delta_S_hat=delta_S_hat,
S=S,
data_mat=data_mat_t,
gamma=gamma,
risk_lambda=risk_lambda):
"""
function_B_vec - compute vector B_{n} from Eq. (52) QLBS Q-Learner in the Black-Scholes-Merton article
Arguments:
t - time index, a scalar, an index into time axis of delta_S_hat
Pi_hat - pandas.DataFrame of dimension N_MC x T of portfolio values
delta_S_hat - pandas.DataFrame of dimension N_MC x T
S - pandas.DataFrame of simulated stock prices
data_mat - pandas.DataFrame of dimension T x N_MC x num_basis
gamma - one time-step discount factor $exp(-r \delta t)$
risk_lambda - risk aversion coefficient, a small positive number
Return:
B_vec - np.array() of dimension num_basis x 1
"""
# coef = 1.0/(2 * gamma * risk_lambda)
# override it by zero to have pure risk hedge
coef = 0. # keep it
### START CODE HERE ### (≈ 3-4 lines of code)
# B_vec = your code goes here ...
tmp = Pi_hat.loc[:,t+1] * delta_S_hat.loc[:, t]
X_mat = data_mat[t, :, :] # matrix of dimension N_MC x num_basis
B_vec = np.dot(X_mat.T, tmp)
### END CODE HERE ###
return B_vec
Compute optimal hedge and portfolio value
Call function_A and function_B for \(t=T-1,...,0\) together with basis function \(\Phi_n\left(X_t\right)\) to compute optimal action \(a_t^\star\left(X_t\right)=\sum_n^N{\phi_{nt}\Phi_n\left(X_t\right)}\) backward recursively with terminal condition \(a_T^\star\left(X_T\right)=0\).
Once the optimal hedge \(a_t^\star\left(X_t\right)\) is computed, the portfolio value \(\Pi_t\) could also be computed backward recursively by
\[\Pi_t=\gamma\left[\Pi_{t+1}-a_t^\star\Delta S_t\right]\quad t=T-1,...,0\]together with the terminal condition \(\Pi_T=H_T\left(S_T\right)=\max\left(K-S_T,0\right)\) for a European put option.
Also compute \(\hat{\Pi}_t=\Pi_t-\bar{\Pi}_t\), where \(\bar{\Pi}_t\) is the sample mean of all values of \(\Pi_t\).
starttime = time.time()
# portfolio value
Pi = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Pi.iloc[:,-1] = S.iloc[:,-1].apply(lambda x: terminal_payoff(x, K))
Pi_hat = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Pi_hat.iloc[:,-1] = Pi.iloc[:,-1] - np.mean(Pi.iloc[:,-1])
# optimal hedge
a = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
a.iloc[:,-1] = 0
reg_param = 1e-3
for t in range(T-1, -1, -1):
A_mat = function_A_vec(t, delta_S_hat, data_mat_t, reg_param)
B_vec = function_B_vec(t, Pi_hat, delta_S_hat, S, data_mat_t)
# print ('t = A_mat.shape = B_vec.shape = ', t, A_mat.shape, B_vec.shape)
phi = np.dot(np.linalg.inv(A_mat), B_vec)
a.loc[:,t] = np.dot(data_mat_t[t,:,:],phi)
Pi.loc[:,t] = gamma * (Pi.loc[:,t+1] - a.loc[:,t] * delta_S.loc[:,t])
Pi_hat.loc[:,t] = Pi.loc[:,t] - np.mean(Pi.loc[:,t])
a = a.astype('float')
Pi = Pi.astype('float')
Pi_hat = Pi_hat.astype('float')
endtime = time.time()
print('Computational time:', endtime - starttime, 'seconds')
/opt/conda/lib/python3.6/site-packages/ipykernel_launcher.py:21: FutureWarning: reshape is deprecated and will raise in a subsequent release. Please use .values.reshape(...) instead
Computational time: 3.004925489425659 seconds
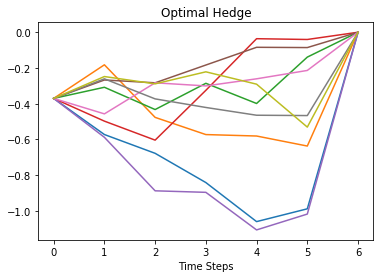
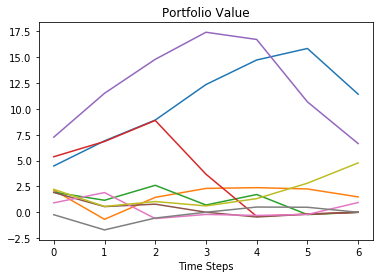
Plots of 5 optimal hedge \(a_t^\star\) and portfolio value \(\Pi_t\) paths are shown below.
# plot 10 paths
plt.plot(a.T.iloc[:,idx_plot])
plt.xlabel('Time Steps')
plt.title('Optimal Hedge')
plt.show()
plt.plot(Pi.T.iloc[:,idx_plot])
plt.xlabel('Time Steps')
plt.title('Portfolio Value')
plt.show()
Once the optimal hedge \(a_t^\star\) and portfolio value \(\Pi_t\) are all computed, the reward function \(R_t\left(X_t,a_t,X_{t+1}\right)\) could then be computed by
\[R_t\left(X_t,a_t,X_{t+1}\right)=\gamma a_t\Delta S_t-\lambda Var\left[\Pi_t\space|\space\mathcal F_t\right]\quad t=0,...,T-1\]with terminal condition \(R_T=-\lambda Var\left[\Pi_T\right]\).
Plot of 5 reward function \(R_t\) paths is shown below.
Part 2: Compute the optimal Q-function with the DP approach
Coefficients for expansions of the optimal Q-function \(Q_t^\star\left(X_t,a_t^\star\right)\) are solved by
\[$\omega_t=\mathbf C_t^{-1}\mathbf D_t\]where \(\mathbf C_t\) and \(\mathbf D_t\) are matrix and vector respectively with elements given by
\[C_{nm}^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Phi_n\left(X_t^k\right)\Phi_m\left(X_t^k\right)}\quad\quad D_n^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Phi_n\left(X_t^k\right)\left(R_t\left(X_t,a_t^\star,X_{t+1}\right)+\gamma\max_{a_{t+1}\in\mathcal{A}}Q_{t+1}^\star\left(X_{t+1},a_{t+1}\right)\right)}\]Define function function_C and function_D to compute the value of matrix \(\mathbf C_t\) and vector \(\mathbf D_t\).
Instructions: Copy-paste implementations from the previous assignment,i.e. QLBS as these are the same functions
def function_C_vec(t, data_mat, reg_param):
"""
function_C_vec - calculate C_{nm} matrix from Eq. (56) (with a regularization!)
Eq. (56) in QLBS Q-Learner in the Black-Scholes-Merton article
Arguments:
t - time index, a scalar, an index into time axis of data_mat
data_mat - pandas.DataFrame of values of basis functions of dimension T x N_MC x num_basis
reg_param - regularization parameter, a scalar
Return:
C_mat - np.array of dimension num_basis x num_basis
"""
### START CODE HERE ### (≈ 5-6 lines of code)
# C_mat = your code goes here ....
X_mat = data_mat[t, :, :]
num_basis_funcs = X_mat.shape[1]
C_mat = np.dot(X_mat.T, X_mat) + reg_param * np.eye(num_basis_funcs)
### END CODE HERE ###
return C_mat
def function_D_vec(t, Q, R, data_mat, gamma=gamma):
"""
function_D_vec - calculate D_{nm} vector from Eq. (56) (with a regularization!)
Eq. (56) in QLBS Q-Learner in the Black-Scholes-Merton article
Arguments:
t - time index, a scalar, an index into time axis of data_mat
Q - pandas.DataFrame of Q-function values of dimension N_MC x T
R - pandas.DataFrame of rewards of dimension N_MC x T
data_mat - pandas.DataFrame of values of basis functions of dimension T x N_MC x num_basis
gamma - one time-step discount factor $exp(-r \delta t)$
Return:
D_vec - np.array of dimension num_basis x 1
"""
### START CODE HERE ### (≈ 2-3 lines of code)
# D_vec = your code goes here ...
X_mat = data_mat[t, :, :]
D_vec = np.dot(X_mat.T, R.loc[:,t] + gamma * Q.loc[:, t+1])
### END CODE HERE ###
return D_vec
Call function_C and function_D for $t=T-1,…,0$ together with basis function $\Phi_n\left(X_t\right)$ to compute optimal action Q-function $Q_t^\star\left(X_t,a_t^\star\right)=\sum_n^N{\omega_{nt}\Phi_n\left(X_t\right)}$ backward recursively with terminal condition $Q_T^\star\left(X_T,a_T=0\right)=-\Pi_T\left(X_T\right)-\lambda Var\left[\Pi_T\left(X_T\right)\right]$.
Compare the QLBS price to European put price given by Black-Sholes formula.
\[C_t^{\left(BS\right)}=Ke^{-r\left(T-t\right)}\mathcal N\left(-d_2\right)-S_t\mathcal N\left(-d_1\right)\]# The Black-Scholes prices
def bs_put(t, S0=S0, K=K, r=r, sigma=sigma, T=M):
d1 = (np.log(S0/K) + (r + 1/2 * sigma**2) * (T-t)) / sigma / np.sqrt(T-t)
d2 = (np.log(S0/K) + (r - 1/2 * sigma**2) * (T-t)) / sigma / np.sqrt(T-t)
price = K * np.exp(-r * (T-t)) * norm.cdf(-d2) - S0 * norm.cdf(-d1)
return price
def bs_call(t, S0=S0, K=K, r=r, sigma=sigma, T=M):
d1 = (np.log(S0/K) + (r + 1/2 * sigma**2) * (T-t)) / sigma / np.sqrt(T-t)
d2 = (np.log(S0/K) + (r - 1/2 * sigma**2) * (T-t)) / sigma / np.sqrt(T-t)
price = S0 * norm.cdf(d1) - K * np.exp(-r * (T-t)) * norm.cdf(d2)
return price
Hedging and Pricing with Reinforcement Learning
Implement a batch-mode off-policy model-free Q-Learning by Fitted Q-Iteration. The only data available is given by a set of $N_{MC}$ paths for the underlying state variable $X_t$, hedge position $a_t$, instantaneous reward $R_t$ and the next-time value $X_{t+1}$.
\[\mathcal F_t^k=\left\{\left(X_t^k,a_t^k,R_t^k,X_{t+1}^k\right)\right\}_{t=0}^{T-1}\quad k=1,...,N_{MC}\]Detailed steps of solving the Bellman optimalty equation by Reinforcement Learning are illustrated below.
Expand Q-function in basis functions with time-dependent coefficients parametrized by a matrix $\mathbf W_t$.
\[Q_t^\star\left(X_t,a_t\right)=\mathbf A_t^T\mathbf W_t\Phi\left(X_t\right)=\mathbf A_t^T\mathbf U_W\left(t,X_t\right)=\vec{W}_t^T \vec{\Psi}\left(X_t,a_t\right)\] \[\mathbf A_t=\left(\begin{matrix}1\\a_t\\\frac{1}{2}a_t^2\end{matrix}\right)\quad\mathbf U_W\left(t,X_t\right)=\mathbf W_t\Phi\left(X_t\right)\]where $\vec{W}_t$ is obtained by concatenating columns of matrix $\mathbf W_t$ while $ vec \left( {\bf \Psi} \left(X_t,a_t \right) \right) = vec \, \left( {\bf A}_t \otimes {\bf \Phi}^T(X) \right) $ stands for a vector obtained by concatenating columns of the outer product of vectors $ {\bf A}_t $ and $ {\bf \Phi}(X) $.
Compute vector $\mathbf A_t$ then compute $\vec\Psi\left(X_t,a_t\right)$ for each $X_t^k$ and store in a dictionary with key path and time $\left[k,t\right]$.
Part 3: Make off-policy data
- on-policy data - contains an optimal action and the corresponding reward
- off-policy data - contains random action and the corresponding reward
Given a large enough sample, i.e. N_MC tending to infinity Q-Learner will learn an optimal policy from the data in a model-free setting. In our case a random action is an optimal action + noise generated by sampling from uniform: distribution \(a_t\left(X_t\right) = a_t^\star\left(X_t\right) \sim U\left[1-\eta, 1 + \eta\right]\)
where $\eta$ is a disturbance level In other words, each noisy action is calculated by taking optimal action computed previously and multiplying it by a uniform r.v. in the interval $\left[1-\eta, 1 + \eta\right]$
Instructions: In the loop below:
- Compute the optimal policy, and write the result to a_op
- Now disturb these values by a random noise \(a_t\left(X_t\right) = a_t^\star\left(X_t\right) \sim U\left[1-\eta, 1 + \eta\right]\)
- Compute portfolio values corresponding to observed actions \(\Pi_t=\gamma\left[\Pi_{t+1}-a_t^\star\Delta S_t\right]\quad t=T-1,...,0\)
- Compute rewards corrresponding to observed actions \(R_t\left(X_t,a_t,X_{t+1}\right)=\gamma a_t\Delta S_t-\lambda Var\left[\Pi_t\space|\space\mathcal F_t\right]\quad t=T-1,...,0\) with terminal condition \(R_T=-\lambda Var\left[\Pi_T\right]\)
eta = 0.5 # 0.5 # 0.25 # 0.05 # 0.5 # 0.1 # 0.25 # 0.15
reg_param = 1e-3
np.random.seed(42) # Fix random seed
# disturbed optimal actions to be computed
a_op = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
a_op.iloc[:,-1] = 0
# also make portfolios and rewards
# portfolio value
Pi_op = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Pi_op.iloc[:,-1] = S.iloc[:,-1].apply(lambda x: terminal_payoff(x, K))
Pi_op_hat = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Pi_op_hat.iloc[:,-1] = Pi_op.iloc[:,-1] - np.mean(Pi_op.iloc[:,-1])
# reward function
R_op = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
R_op.iloc[:,-1] = - risk_lambda * np.var(Pi_op.iloc[:,-1])
# The backward loop
for t in range(T-1, -1, -1):
### START CODE HERE ### (≈ 11-12 lines of code)
# 1. Compute the optimal policy, and write the result to a_op
a_op.loc[:, t] = a.loc[:, t]
# 2. Now disturb these values by a random noise
a_op.loc[:, t] *= np.random.uniform(1 - eta, 1 + eta, size=a_op.shape[0])
# 3. Compute portfolio values corresponding to observed actions
Pi_op.loc[:,t] = gamma * (Pi_op.loc[:,t+1] - a_op.loc[:,t] * delta_S.loc[:,t])
Pi_hat.loc[:,t] = Pi_op.loc[:,t] - np.mean(Pi_op.loc[:,t])
# 4. Compute rewards corrresponding to observed actions
R_op.loc[:,t] = gamma * a_op.loc[:,t] * delta_S.loc[:,t] - risk_lambda * np.var(Pi_op.loc[:,t])
### END CODE HERE ###
print('done with backward loop!')
done with backward loop!
### GRADED PART (DO NOT EDIT) ###
np.random.seed(42)
idx_row = np.random.randint(low=0, high=R_op.shape[0], size=10)
np.random.seed(42)
idx_col = np.random.randint(low=0, high=R_op.shape[1], size=10)
part_1 = list(R_op.loc[idx_row, idx_col].values.flatten())
try:
part1 = " ".join(map(repr, part_1))
except TypeError:
part1 = repr(part_1)
submissions[all_parts[0]]=part1
grading.submit(COURSERA_EMAIL, COURSERA_TOKEN, assignment_key,all_parts[:1],all_parts,submissions)
R_op.loc[idx_row, idx_col].values.flatten()
### GRADED PART (DO NOT EDIT) ###
Submission successful, please check on the coursera grader page for the status
array([ -4.41648229e-02, -1.11627835e+00, -3.26618627e-01,
-4.41648229e-02, 1.86629772e-01, -3.26618627e-01,
-3.26618627e-01, -4.41648229e-02, -1.91643174e+00,
1.86629772e-01, -4.41648229e-02, -1.15471981e+01,
8.36214406e-03, -4.41648229e-02, -5.19860756e-01,
8.36214406e-03, 8.36214406e-03, -4.41648229e-02,
-5.82629891e-02, -5.19860756e-01, -4.41648229e-02,
-2.93024596e+00, -6.70591047e-01, -4.41648229e-02,
3.38303735e-01, -6.70591047e-01, -6.70591047e-01,
-4.41648229e-02, -1.35776224e-01, 3.38303735e-01,
-4.41648229e-02, 3.89179538e-02, -2.11256164e+00,
-4.41648229e-02, -8.62139383e-01, -2.11256164e+00,
-2.11256164e+00, -4.41648229e-02, 1.03931641e+00,
-8.62139383e-01, -4.41648229e-02, -3.88581528e+00,
-2.78664643e-01, -4.41648229e-02, 1.08026845e+00,
-2.78664643e-01, -2.78664643e-01, -4.41648229e-02,
-1.59815566e-01, 1.08026845e+00, -4.41648229e-02,
1.34127261e+00, -1.32542466e+00, -4.41648229e-02,
-1.75711669e-01, -1.32542466e+00, -1.32542466e+00,
-4.41648229e-02, -6.89031647e-01, -1.75711669e-01,
-4.41648229e-02, 1.36065847e+00, -4.83656917e-03,
-4.41648229e-02, 1.01545031e+00, -4.83656917e-03,
-4.83656917e-03, -4.41648229e-02, 1.06509261e+00,
1.01545031e+00, -4.41648229e-02, -5.48069399e-01,
6.69233272e+00, -4.41648229e-02, 2.48031088e+00,
6.69233272e+00, 6.69233272e+00, -4.41648229e-02,
-4.96873017e-01, 2.48031088e+00, -4.41648229e-02,
1.05762523e+00, -5.25381441e+00, -4.41648229e-02,
-3.93284570e+00, -5.25381441e+00, -5.25381441e+00,
-4.41648229e-02, -1.75980494e-01, -3.93284570e+00,
-4.41648229e-02, -1.12194921e-01, -2.04245741e-02,
-4.41648229e-02, -2.95192215e-01, -2.04245741e-02,
-2.04245741e-02, -4.41648229e-02, -1.70008788e+00,
-2.95192215e-01])
### GRADED PART (DO NOT EDIT) ###
np.random.seed(42)
idx_row = np.random.randint(low=0, high=Pi_op.shape[0], size=10)
np.random.seed(42)
idx_col = np.random.randint(low=0, high=Pi_op.shape[1], size=10)
part_2 = list(Pi_op.loc[idx_row, idx_col].values.flatten())
try:
part2 = " ".join(map(repr, part_2))
except TypeError:
part2 = repr(part_2)
submissions[all_parts[1]]=part2
grading.submit(COURSERA_EMAIL, COURSERA_TOKEN, assignment_key,all_parts[:2],all_parts,submissions)
Pi_op.loc[idx_row, idx_col].values.flatten()
### GRADED PART (DO NOT EDIT) ###
Submission successful, please check on the coursera grader page for the status
array([ 0. , 1.42884104, 0.33751419, 0. ,
1.21733506, 0.33751419, 0.33751419, 0. ,
3.11498207, 1.21733506, 0. , 11.42133749,
-0.10310673, 0. , 11.86648425, -0.10310673,
-0.10310673, 0. , 11.85284966, 11.86648425,
0. , 3.77013248, 0.86748124, 0. ,
3.39527529, 0.86748124, 0.86748124, 0. ,
3.50140426, 3.39527529, 0. , 2.37907167,
2.45349463, 0. , 3.21159555, 2.45349463,
2.45349463, 0. , 2.143548 , 3.21159555,
0. , 4.22816728, 0.36745282, 0. ,
3.10906092, 0.36745282, 0.36745282, 0. ,
3.24065673, 3.10906092, 0. , 1.4213709 ,
2.79987609, 0. , 1.57224362, 2.79987609,
2.79987609, 0. , 2.24072042, 1.57224362,
9.05061694, 4.48960086, 5.90296866, 9.05061694,
3.43400874, 5.90296866, 5.90296866, 9.05061694,
2.3390757 , 3.43400874, 11.39022164, 5.65090831,
5.15180177, 11.39022164, 3.12466356, 5.15180177,
5.15180177, 11.39022164, 3.59323901, 3.12466356,
0. , 3.05819303, 4.15983366, 0. ,
6.95803609, 4.15983366, 4.15983366, 0. ,
7.08659999, 6.95803609, 0. , 0.12024876,
0.03147899, 0. , 0.3970914 , 0.03147899,
0.03147899, 0. , 2.08248553, 0.3970914 ])
Override on-policy data with off-policy data
# Override on-policy data with off-policy data
a = a_op.copy() # distrubed actions
Pi = Pi_op.copy() # disturbed portfolio values
Pi_hat = Pi_op_hat.copy()
R = R_op.copy()
# make matrix A_t of shape (3 x num_MC x num_steps)
num_MC = a.shape[0] # number of simulated paths
num_TS = a.shape[1] # number of time steps
a_1_1 = a.values.reshape((1, num_MC, num_TS))
a_1_2 = 0.5 * a_1_1**2
ones_3d = np.ones((1, num_MC, num_TS))
A_stack = np.vstack((ones_3d, a_1_1, a_1_2))
print(A_stack.shape)
(3, 10000, 7)
data_mat_swap_idx = np.swapaxes(data_mat_t,0,2)
print(data_mat_swap_idx.shape) # (12, 10000, 25)
# expand dimensions of matrices to multiply element-wise
A_2 = np.expand_dims(A_stack, axis=1) # becomes (3,1,10000,25)
data_mat_swap_idx = np.expand_dims(data_mat_swap_idx, axis=0) # becomes (1,12,10000,25)
Psi_mat = np.multiply(A_2, data_mat_swap_idx) # this is a matrix of size 3 x num_basis x num_MC x num_steps
# now concatenate columns along the first dimension
# Psi_mat = Psi_mat.reshape(-1, a.shape[0], a.shape[1], order='F')
Psi_mat = Psi_mat.reshape(-1, N_MC, T+1, order='F')
print(Psi_mat.shape) #
(12, 10000, 7)
(36, 10000, 7)
# make matrix S_t
Psi_1_aux = np.expand_dims(Psi_mat, axis=1)
Psi_2_aux = np.expand_dims(Psi_mat, axis=0)
print(Psi_1_aux.shape, Psi_2_aux.shape)
S_t_mat = np.sum(np.multiply(Psi_1_aux, Psi_2_aux), axis=2)
print(S_t_mat.shape)
(36, 1, 10000, 7) (1, 36, 10000, 7)
(36, 36, 7)
# clean up some space
del Psi_1_aux, Psi_2_aux, data_mat_swap_idx, A_2
Part 4: Calculate $\mathbf S_t$ and $\mathbf M_t$ marix and vector
Vector $\vec W_t$ could be solved by
\[\vec W_t=\mathbf S_t^{-1}\mathbf M_t\]where $\mathbf S_t$ and $\mathbf M_t$ are matrix and vector respectively with elements given by
\[S_{nm}^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Psi_n\left(X_t^k,a_t^k\right)\Psi_m\left(X_t^k,a_t^k\right)}\quad\quad M_n^{\left(t\right)}=\sum_{k=1}^{N_{MC}}{\Psi_n\left(X_t^k,a_t^k\right)\left(R_t\left(X_t,a_t,X_{t+1}\right)+\gamma\max_{a_{t+1}\in\mathcal{A}}Q_{t+1}^\star\left(X_{t+1},a_{t+1}\right)\right)}\]Define function function_S and function_M to compute the value of matrix $\mathbf S_t$ and vector $\mathbf M_t$.
Instructions:
- implement function_S_vec() which computes $S_{nm}^{\left(t\right)}$ matrix
- implement function_M_vec() which computes $M_n^{\left(t\right)}$ column vector
# vectorized functions
def function_S_vec(t, S_t_mat, reg_param):
"""
function_S_vec - calculate S_{nm} matrix from Eq. (75) (with a regularization!)
Eq. (75) in QLBS Q-Learner in the Black-Scholes-Merton article
num_Qbasis = 3 x num_basis, 3 because of the basis expansion (1, a_t, 0.5 a_t^2)
Arguments:
t - time index, a scalar, an index into time axis of S_t_mat
S_t_mat - pandas.DataFrame of dimension num_Qbasis x num_Qbasis x T
reg_param - regularization parameter, a scalar
Return:
S_mat_reg - num_Qbasis x num_Qbasis
"""
### START CODE HERE ### (≈ 4-5 lines of code)
# S_mat_reg = your code goes here ...
num_Qbasis = S_t_mat.shape[0]
S_mat_reg = S_t_mat[:,:,t] + reg_param * np.eye(num_Qbasis)
### END CODE HERE ###
return S_mat_reg
def function_M_vec(t,
Q_star,
R,
Psi_mat_t,
gamma=gamma):
"""
function_S_vec - calculate M_{nm} vector from Eq. (75) (with a regularization!)
Eq. (75) in QLBS Q-Learner in the Black-Scholes-Merton article
num_Qbasis = 3 x num_basis, 3 because of the basis expansion (1, a_t, 0.5 a_t^2)
Arguments:
t- time index, a scalar, an index into time axis of S_t_mat
Q_star - pandas.DataFrame of Q-function values of dimension N_MC x T
R - pandas.DataFrame of rewards of dimension N_MC x T
Psi_mat_t - pandas.DataFrame of dimension num_Qbasis x N_MC
gamma - one time-step discount factor $exp(-r \delta t)$
Return:
M_t - np.array of dimension num_Qbasis x 1
"""
### START CODE HERE ### (≈ 2-3 lines of code)
# M_t = your code goes here ...
M_t = np.dot(Psi_mat_t, R.loc[:,t] + gamma * Q_star.loc[:, t+1])
### END CODE HERE ###
return M_t
### GRADED PART (DO NOT EDIT) ###
reg_param = 1e-3
np.random.seed(42)
S_mat_reg = function_S_vec(T-1, S_t_mat, reg_param)
idx_row = np.random.randint(low=0, high=S_mat_reg.shape[0], size=10)
np.random.seed(42)
idx_col = np.random.randint(low=0, high=S_mat_reg.shape[1], size=10)
part_3 = list(S_mat_reg[idx_row, idx_col].flatten())
try:
part3 = " ".join(map(repr, part_3))
except TypeError:
part3 = repr(part_3)
submissions[all_parts[2]]=part3
grading.submit(COURSERA_EMAIL, COURSERA_TOKEN, assignment_key,all_parts[:3],all_parts,submissions)
S_mat_reg[idx_row, idx_col].flatten()
### GRADED PART (DO NOT EDIT) ###
Submission successful, please check on the coursera grader page for the status
array([ 2.22709265e-01, 2.68165972e+02, 4.46911166e+01,
2.00678517e+00, 1.10020457e+03, 8.44758984e-01,
2.29671816e+02, 2.29671816e+02, 3.78571544e-03,
1.41884196e-02])
### GRADED PART (DO NOT EDIT) ###
Q_RL = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Q_RL.iloc[:,-1] = - Pi.iloc[:,-1] - risk_lambda * np.var(Pi.iloc[:,-1])
Q_star = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Q_star.iloc[:,-1] = Q_RL.iloc[:,-1]
M_t = function_M_vec(T-1, Q_star, R, Psi_mat[:,:,T-1], gamma)
part_4 = list(M_t)
try:
part4 = " ".join(map(repr, part_4))
except TypeError:
part4 = repr(part_4)
submissions[all_parts[3]]=part4
grading.submit(COURSERA_EMAIL, COURSERA_TOKEN, assignment_key,all_parts[:4],all_parts,submissions)
M_t
### GRADED PART (DO NOT EDIT) ###
Submission successful, please check on the coursera grader page for the status
array([ -6.03245979e+01, -8.79998437e+01, -2.37497369e+02,
-5.62543448e+02, 2.09052583e+02, -6.44961368e+02,
-2.86243249e+03, 2.77687723e+03, -1.85728309e+03,
-9.40505558e+03, 9.50610806e+03, -5.29328413e+03,
-1.69800964e+04, 1.61026240e+04, -8.42698927e+03,
-8.46211901e+03, 6.05144701e+03, -2.62196067e+03,
-2.12066484e+03, 8.42176836e+02, -2.51624368e+02,
-3.01116012e+02, 2.57124667e+01, -3.22639691e+00,
-5.53769815e+01, 1.67390280e+00, -6.79562288e-02,
-1.61140947e+01, 1.16524075e+00, -1.49934348e-01,
-9.79117274e+00, -7.22309330e-02, -4.70108927e-01,
-6.87393130e+00, -2.10244341e+00, -7.70293521e-01])
Call function_S and function_M for $t=T-1,…,0$ together with vector $\vec\Psi\left(X_t,a_t\right)$ to compute $\vec W_t$ and learn the Q-function $Q_t^\star\left(X_t,a_t\right)=\mathbf A_t^T\mathbf U_W\left(t,X_t\right)$ implied by the input data backward recursively with terminal condition $Q_T^\star\left(X_T,a_T=0\right)=-\Pi_T\left(X_T\right)-\lambda Var\left[\Pi_T\left(X_T\right)\right]$.
When the vector $ \vec{W}_t $ is computed as per the above at time $ t $, we can convert it back to a matrix $ \bf{W}_t $ obtained from the vector $ \vec{W}_t $ by reshaping to the shape $ 3 \times M $.
We can now calculate the matrix $ {\bf U}_t $ at time $ t $ for the whole set of MC paths as follows (this is Eq.(65) from the paper in a matrix form):
\[\mathbf U_{W} \left(t,X_t \right) = \left[\begin{matrix} \mathbf U_W^{0,k}\left(t,X_t \right) \\ \mathbf U_W^{1,k}\left(t,X_t \right) \\ \mathbf U_W^{2,k} \left(t,X_t \right) \end{matrix}\right] = \bf{W}_t \Phi_t \left(t,X_t \right)\]Here the matrix $ {\bf \Phi}t $ has the shape shape $ M \times N{MC}$. Therefore, their dot product has dimension $ 3 \times N_{MC}$, as it should be.
Once this matrix $ {\bf U}t $ is computed, individual vectors $ {\bf U}{W}^{1}, {\bf U}{W}^{2}, {\bf U}{W}^{3} $ for all MC paths are read off as rows of this matrix.
From here, we can compute the optimal action and optimal Q-function $Q^{\star}(X_t, a_t^{\star}) $ at the optimal action for a given step $ t $. This will be used to evaluate the $ \max_{a_{t+1} \in \mathcal{A}} Q^{\star} \left(X_{t+1}, a_{t+1} \right) $.
The optimal action and optimal Q-function with the optimal action could be computed by
\[a_t^\star\left(X_t\right)=\frac{\mathbb{E}_{t} \left[ \Delta \hat{S}_{t} \hat{\Pi}_{t+1} + \frac{1}{2 \gamma \lambda} \Delta S_{t} \right]}{ \mathbb{E}_{t} \left[ \left( \Delta \hat{S}_{t} \right)^2 \right]}\, , \quad\quad Q_t^\star\left(X_t,a_t^\star\right)=\mathbf U_W^{\left(0\right)}\left(t,X_t\right)+ a_t^\star \mathbf U_W^{\left(2\right)}\left(t,X_t\right) +\frac{1}{2}\left(a_t^\star\right)^2\mathbf U_W^{\left(2\right)}\left(t,X_t\right)\]with terminal condition $a_T^\star=0$ and $Q_T^\star\left(X_T,a_T^\star=0\right)=-\Pi_T\left(X_T\right)-\lambda Var\left[\Pi_T\left(X_T\right)\right]$.
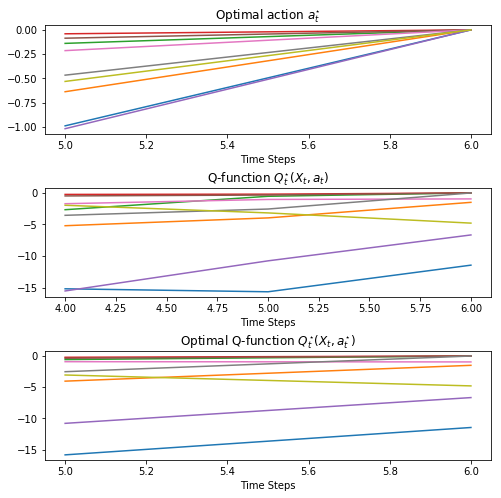
Plots of 5 optimal action $a_t^\star\left(X_t\right)$, optimal Q-function with optimal action $Q_t^\star\left(X_t,a_t^\star\right)$ and implied Q-function $Q_t^\star\left(X_t,a_t\right)$ paths are shown below.
Fitted Q Iteration (FQI)
starttime = time.time()
# implied Q-function by input data (using the first form in Eq.(68))
Q_RL = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Q_RL.iloc[:,-1] = - Pi.iloc[:,-1] - risk_lambda * np.var(Pi.iloc[:,-1])
# optimal action
a_opt = np.zeros((N_MC,T+1))
a_star = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
a_star.iloc[:,-1] = 0
# optimal Q-function with optimal action
Q_star = pd.DataFrame([], index=range(1, N_MC+1), columns=range(T+1))
Q_star.iloc[:,-1] = Q_RL.iloc[:,-1]
# max_Q_star_next = Q_star.iloc[:,-1].values
max_Q_star = np.zeros((N_MC,T+1))
max_Q_star[:,-1] = Q_RL.iloc[:,-1].values
num_basis = data_mat_t.shape[2]
reg_param = 1e-3
hyper_param = 1e-1
# The backward loop
for t in range(T-1, -1, -1):
# calculate vector W_t
S_mat_reg = function_S_vec(t,S_t_mat,reg_param)
M_t = function_M_vec(t,Q_star, R, Psi_mat[:,:,t], gamma)
W_t = np.dot(np.linalg.inv(S_mat_reg),M_t) # this is an 1D array of dimension 3M
# reshape to a matrix W_mat
W_mat = W_t.reshape((3, num_basis), order='F') # shape 3 x M
# make matrix Phi_mat
Phi_mat = data_mat_t[t,:,:].T # dimension M x N_MC
# compute matrix U_mat of dimension N_MC x 3
U_mat = np.dot(W_mat, Phi_mat)
# compute vectors U_W^0,U_W^1,U_W^2 as rows of matrix U_mat
U_W_0 = U_mat[0,:]
U_W_1 = U_mat[1,:]
U_W_2 = U_mat[2,:]
# IMPORTANT!!! Instead, use hedges computed as in DP approach:
# in this way, errors of function approximation do not back-propagate.
# This provides a stable solution, unlike
# the first method that leads to a diverging solution
A_mat = function_A_vec(t, delta_S_hat, data_mat_t, reg_param)
B_vec = function_B_vec(t, Pi_hat, delta_S_hat, S, data_mat_t)
# print ('t = A_mat.shape = B_vec.shape = ', t, A_mat.shape, B_vec.shape)
phi = np.dot(np.linalg.inv(A_mat), B_vec)
a_opt[:,t] = np.dot(data_mat_t[t,:,:],phi)
a_star.loc[:,t] = a_opt[:,t]
max_Q_star[:,t] = U_W_0 + a_opt[:,t] * U_W_1 + 0.5 * (a_opt[:,t]**2) * U_W_2
# update dataframes
Q_star.loc[:,t] = max_Q_star[:,t]
# update the Q_RL solution given by a dot product of two matrices W_t Psi_t
Psi_t = Psi_mat[:,:,t].T # dimension N_MC x 3M
Q_RL.loc[:,t] = np.dot(Psi_t, W_t)
# trim outliers for Q_RL
up_percentile_Q_RL = 95 # 95
low_percentile_Q_RL = 5 # 5
low_perc_Q_RL, up_perc_Q_RL = np.percentile(Q_RL.loc[:,t],[low_percentile_Q_RL,up_percentile_Q_RL])
# print('t = %s low_perc_Q_RL = %s up_perc_Q_RL = %s' % (t, low_perc_Q_RL, up_perc_Q_RL))
# trim outliers in values of max_Q_star:
flag_lower = Q_RL.loc[:,t].values < low_perc_Q_RL
flag_upper = Q_RL.loc[:,t].values > up_perc_Q_RL
Q_RL.loc[flag_lower,t] = low_perc_Q_RL
Q_RL.loc[flag_upper,t] = up_perc_Q_RL
endtime = time.time()
print('\nTime Cost:', endtime - starttime, 'seconds')
/opt/conda/lib/python3.6/site-packages/ipykernel_launcher.py:21: FutureWarning: reshape is deprecated and will raise in a subsequent release. Please use .values.reshape(...) instead
/opt/conda/lib/python3.6/site-packages/numpy/lib/function_base.py:4116: RuntimeWarning: Invalid value encountered in percentile
interpolation=interpolation)
/opt/conda/lib/python3.6/site-packages/ipykernel_launcher.py:77: RuntimeWarning: invalid value encountered in less
/opt/conda/lib/python3.6/site-packages/ipykernel_launcher.py:78: RuntimeWarning: invalid value encountered in greater
Time Cost: 4.891070604324341 seconds
# plot both simulations
f, axarr = plt.subplots(3, 1)
f.subplots_adjust(hspace=.5)
f.set_figheight(8.0)
f.set_figwidth(8.0)
step_size = N_MC // 10
idx_plot = np.arange(step_size, N_MC, step_size)
axarr[0].plot(a_star.T.iloc[:, idx_plot])
axarr[0].set_xlabel('Time Steps')
axarr[0].set_title(r'Optimal action $a_t^{\star}$')
axarr[1].plot(Q_RL.T.iloc[:, idx_plot])
axarr[1].set_xlabel('Time Steps')
axarr[1].set_title(r'Q-function $Q_t^{\star} (X_t, a_t)$')
axarr[2].plot(Q_star.T.iloc[:, idx_plot])
axarr[2].set_xlabel('Time Steps')
axarr[2].set_title(r'Optimal Q-function $Q_t^{\star} (X_t, a_t^{\star})$')
plt.savefig('QLBS_FQI_off_policy_summary_ATM_eta_%d.png' % (100 * eta), dpi=600)
plt.show()
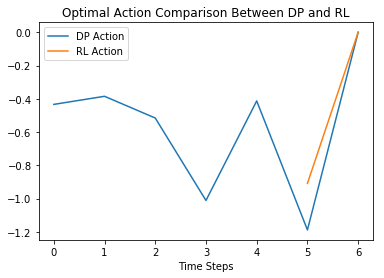
Compare the optimal action $a_t^\star\left(X_t\right)$ and optimal Q-function with optimal action $Q_t^\star\left(X_t,a_t^\star\right)$ given by Dynamic Programming and Reinforcement Learning.
Plots of 1 path comparisons are given below.
# plot a and a_star
# plot 1 path
num_path = 120 # 240 # 260 # 300 # 430 # 510
# Note that a from the DP method and a_star from the RL method are now identical by construction
plt.plot(a.T.iloc[:,num_path], label="DP Action")
plt.plot(a_star.T.iloc[:,num_path], label="RL Action")
plt.legend()
plt.xlabel('Time Steps')
plt.title('Optimal Action Comparison Between DP and RL')
plt.show()
Summary of the RL-based pricing with QLBS
# QLBS option price
C_QLBS = - Q_star.copy() # Q_RL #
print('---------------------------------')
print(' QLBS RL Option Pricing ')
print('---------------------------------\n')
print('%-25s' % ('Initial Stock Price:'), S0)
print('%-25s' % ('Drift of Stock:'), mu)
print('%-25s' % ('Volatility of Stock:'), sigma)
print('%-25s' % ('Risk-free Rate:'), r)
print('%-25s' % ('Risk aversion parameter :'), risk_lambda)
print('%-25s' % ('Strike:'), K)
print('%-25s' % ('Maturity:'), M)
print('%-26s %.4f' % ('\nThe QLBS Put Price 1 :', (np.mean(C_QLBS.iloc[:,0]))))
print('%-26s %.4f' % ('\nBlack-Sholes Put Price:', bs_put(0)))
print('\n')
# # plot one path
# plt.plot(C_QLBS.T.iloc[:,[200]])
# plt.xlabel('Time Steps')
# plt.title('QLBS RL Option Price')
# plt.show()
---------------------------------
QLBS RL Option Pricing
---------------------------------
Initial Stock Price: 100
Drift of Stock: 0.05
Volatility of Stock: 0.15
Risk-free Rate: 0.03
Risk aversion parameter : 0.001
Strike: 100
Maturity: 1
The QLBS Put Price 1 : nan
Black-Sholes Put Price: 4.5296
### GRADED PART (DO NOT EDIT) ###
part5 = str(C_QLBS.iloc[0,0])
submissions[all_parts[4]]=part5
grading.submit(COURSERA_EMAIL, COURSERA_TOKEN, assignment_key,all_parts[:5],all_parts,submissions)
C_QLBS.iloc[0,0]
### GRADED PART (DO NOT EDIT) ###
Submission successful, please check on the coursera grader page for the status
nan
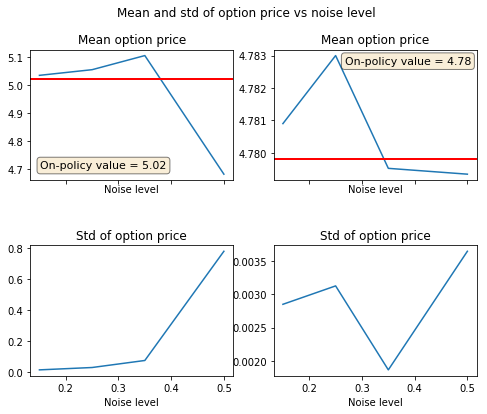
# add here calculation of different MC runs (6 repetitions of action randomization)
# on-policy values
y1_onp = 5.0211 # 4.9170
y2_onp = 4.7798 # 7.6500
# QLBS_price_on_policy = 4.9004 +/- 0.1206
# these are the results for noise eta = 0.15
# p1 = np.array([5.0174, 4.9249, 4.9191, 4.9039, 4.9705, 4.6216 ])
# p2 = np.array([6.3254, 8.6733, 8.0686, 7.5355, 7.1751, 7.1959 ])
p1 = np.array([5.0485, 5.0382, 5.0211, 5.0532, 5.0184])
p2 = np.array([4.7778, 4.7853, 4.7781,4.7805, 4.7828])
# results for eta = 0.25
# p3 = np.array([4.9339, 4.9243, 4.9224, 5.1643, 5.0449, 4.9176 ])
# p4 = np.array([7.7696,8.1922, 7.5440,7.2285, 5.6306, 12.6072])
p3 = np.array([5.0147, 5.0445, 5.1047, 5.0644, 5.0524])
p4 = np.array([4.7842,4.7873, 4.7847, 4.7792, 4.7796])
# eta = 0.35
# p7 = np.array([4.9718, 4.9528, 5.0170, 4.7138, 4.9212, 4.6058])
# p8 = np.array([8.2860, 7.4012, 7.2492, 8.9926, 6.2443, 6.7755])
p7 = np.array([5.1342, 5.2288, 5.0905, 5.0784, 5.0013 ])
p8 = np.array([4.7762, 4.7813,4.7789, 4.7811, 4.7801])
# results for eta = 0.5
# p5 = np.array([4.9446, 4.9894,6.7388, 4.7938,6.1590, 4.5935 ])
# p6 = np.array([7.5632, 7.9250, 6.3491, 7.3830, 13.7668, 14.6367 ])
p5 = np.array([3.1459, 4.9673, 4.9348, 5.2998, 5.0636 ])
p6 = np.array([4.7816, 4.7814, 4.7834, 4.7735, 4.7768])
# print(np.mean(p1), np.mean(p3), np.mean(p5))
# print(np.mean(p2), np.mean(p4), np.mean(p6))
# print(np.std(p1), np.std(p3), np.std(p5))
# print(np.std(p2), np.std(p4), np.std(p6))
x = np.array([0.15, 0.25, 0.35, 0.5])
y1 = np.array([np.mean(p1), np.mean(p3), np.mean(p7), np.mean(p5)])
y2 = np.array([np.mean(p2), np.mean(p4), np.mean(p8), np.mean(p6)])
y_err_1 = np.array([np.std(p1), np.std(p3),np.std(p7), np.std(p5)])
y_err_2 = np.array([np.std(p2), np.std(p4), np.std(p8), np.std(p6)])
# plot it
f, axs = plt.subplots(nrows=2, ncols=2, sharex=True)
f.subplots_adjust(hspace=.5)
f.set_figheight(6.0)
f.set_figwidth(8.0)
ax = axs[0,0]
ax.plot(x, y1)
ax.axhline(y=y1_onp,linewidth=2, color='r')
textstr = 'On-policy value = %2.2f'% (y1_onp)
props = dict(boxstyle='round', facecolor='wheat', alpha=0.5)
# place a text box in upper left in axes coords
ax.text(0.05, 0.15, textstr, fontsize=11,transform=ax.transAxes, verticalalignment='top', bbox=props)
ax.set_title('Mean option price')
ax.set_xlabel('Noise level')
ax = axs[0,1]
ax.plot(x, y2)
ax.axhline(y=y2_onp,linewidth=2, color='r')
textstr = 'On-policy value = %2.2f'% (y2_onp)
props = dict(boxstyle='round', facecolor='wheat', alpha=0.5)
# place a text box in upper left in axes coords
ax.text(0.35, 0.95, textstr, fontsize=11,transform=ax.transAxes, verticalalignment='top', bbox=props)
ax.set_title('Mean option price')
ax.set_xlabel('Noise level')
ax = axs[1,0]
ax.plot(x, y_err_1)
ax.set_title('Std of option price')
ax.set_xlabel('Noise level')
ax = axs[1,1]
ax.plot(x, y_err_2)
ax.set_title('Std of option price')
ax.set_xlabel('Noise level')
f.suptitle('Mean and std of option price vs noise level')
plt.savefig('Option_price_vs_noise_level.png', dpi=600)
plt.show()