- from control to reinforcement learning
- function approximation
- what is the ‘true’ value?
- People who works on incorporating rl with control
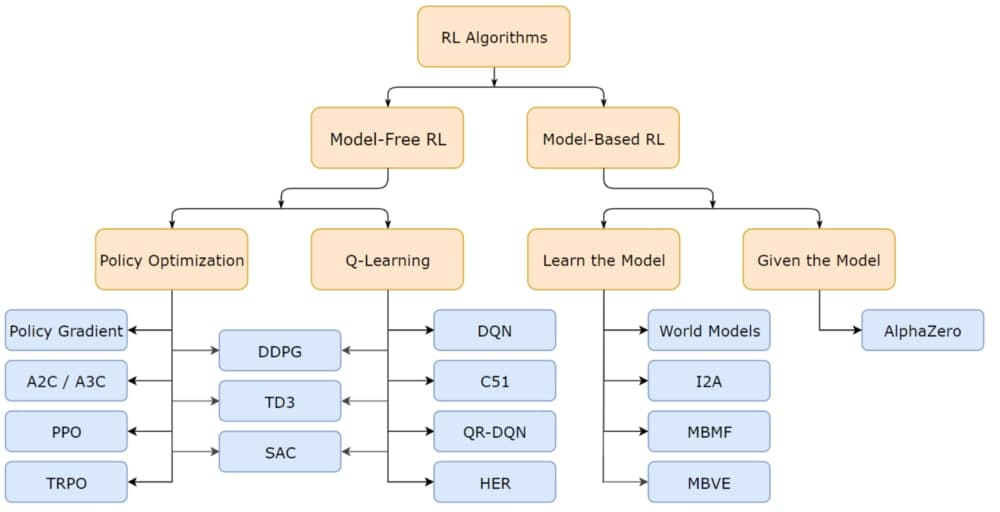
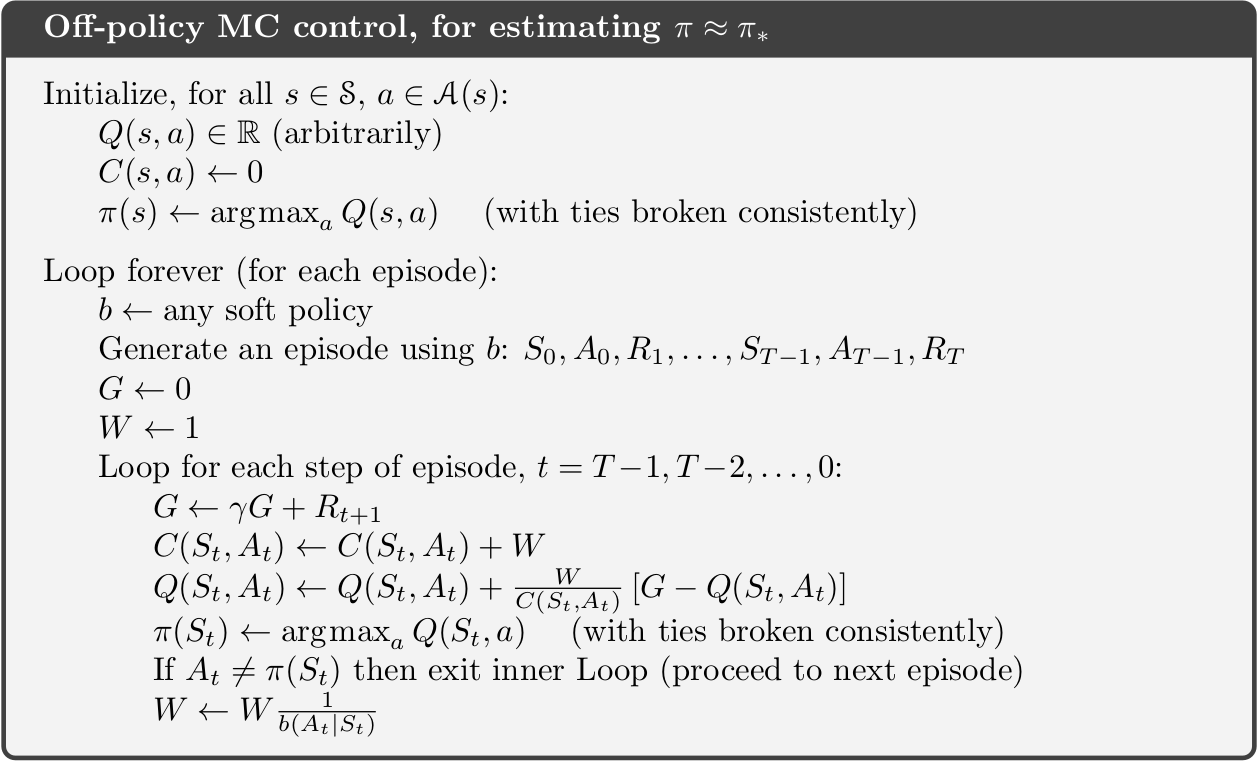
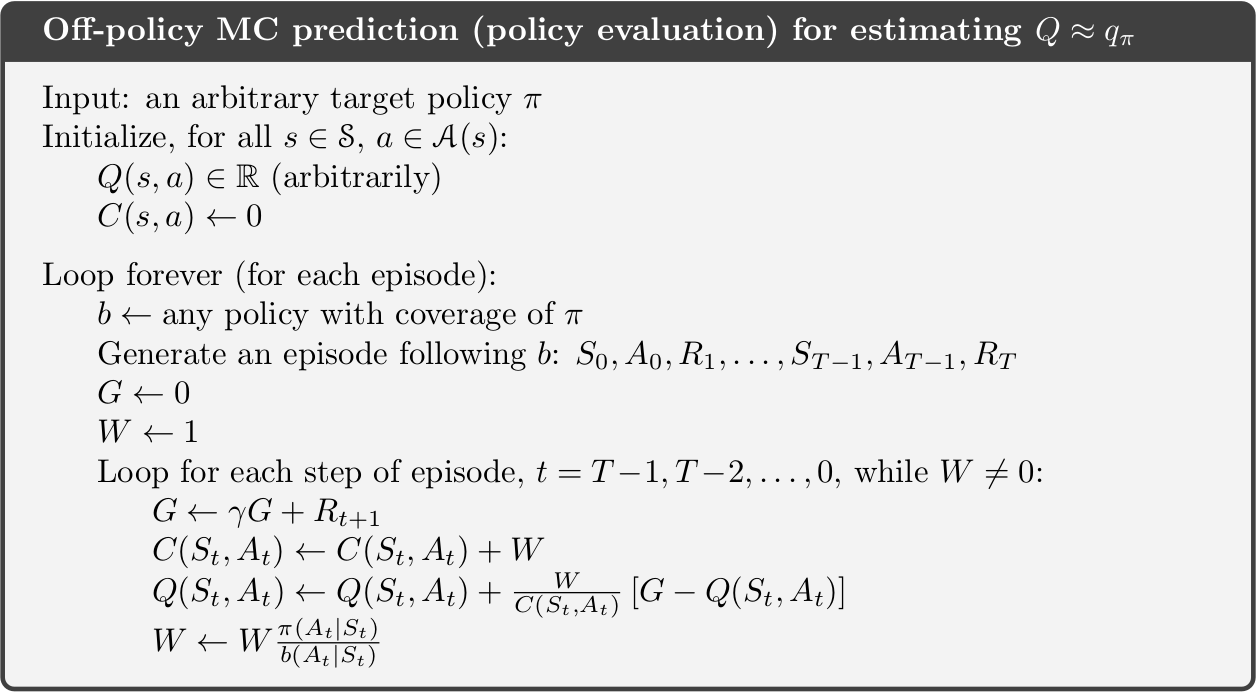
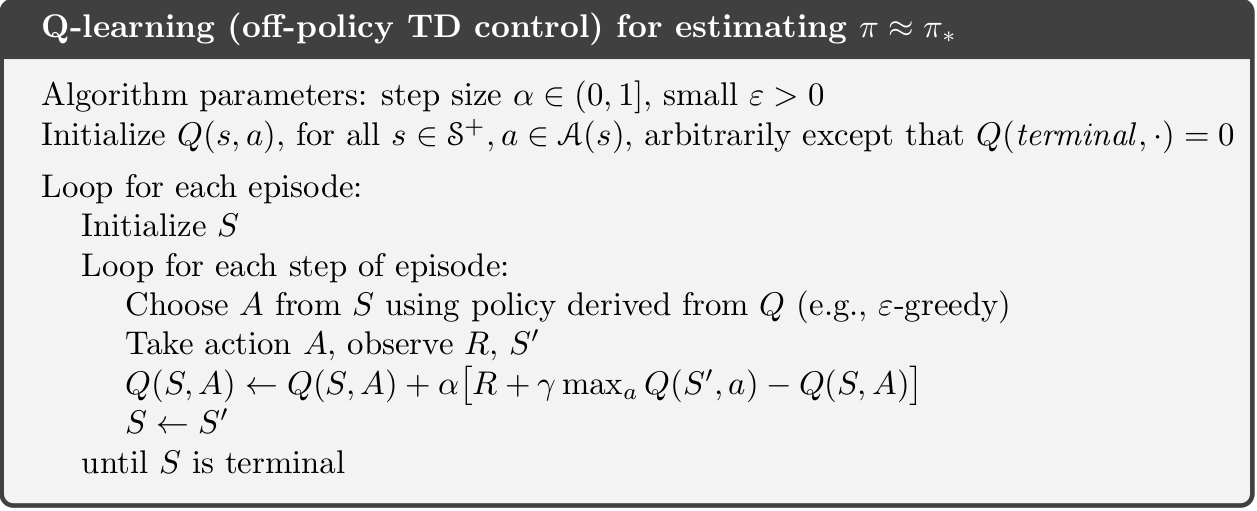
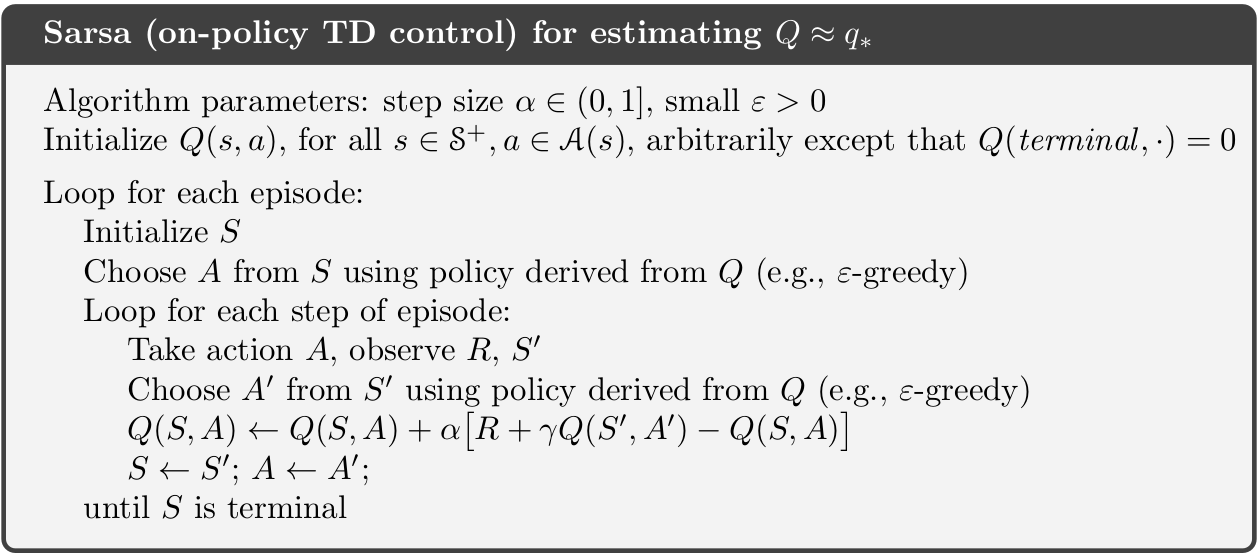
- algorithms
from control to reinforcement learning
 reinforcement learning is best seen as a part of the control literature. specifically, blackbox optimization where part of the strategies utilized in the control literature is replaced by function approximators.
reinforcement learning is best seen as a part of the control literature. specifically, blackbox optimization where part of the strategies utilized in the control literature is replaced by function approximators.
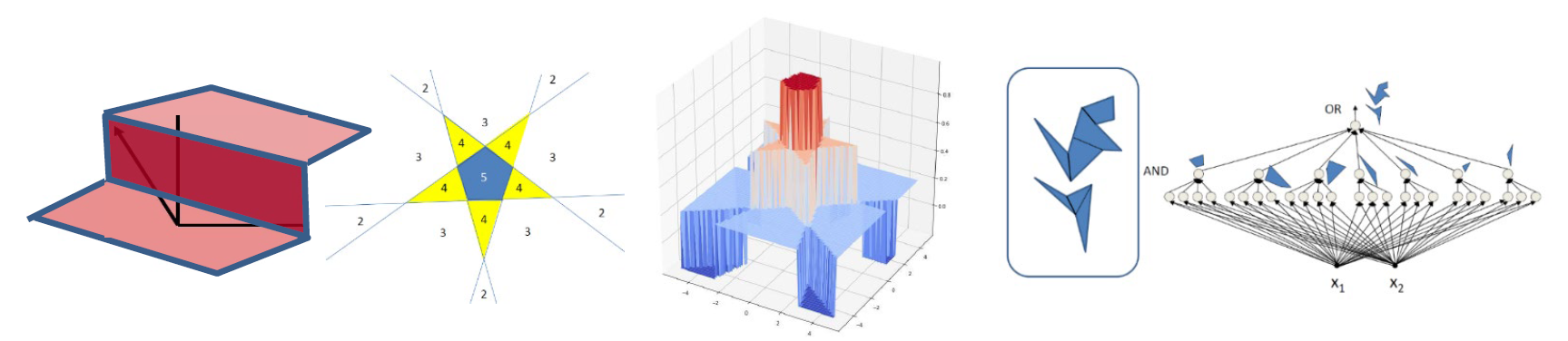
function approximation
kernel transform
![]()
neural network decomposition
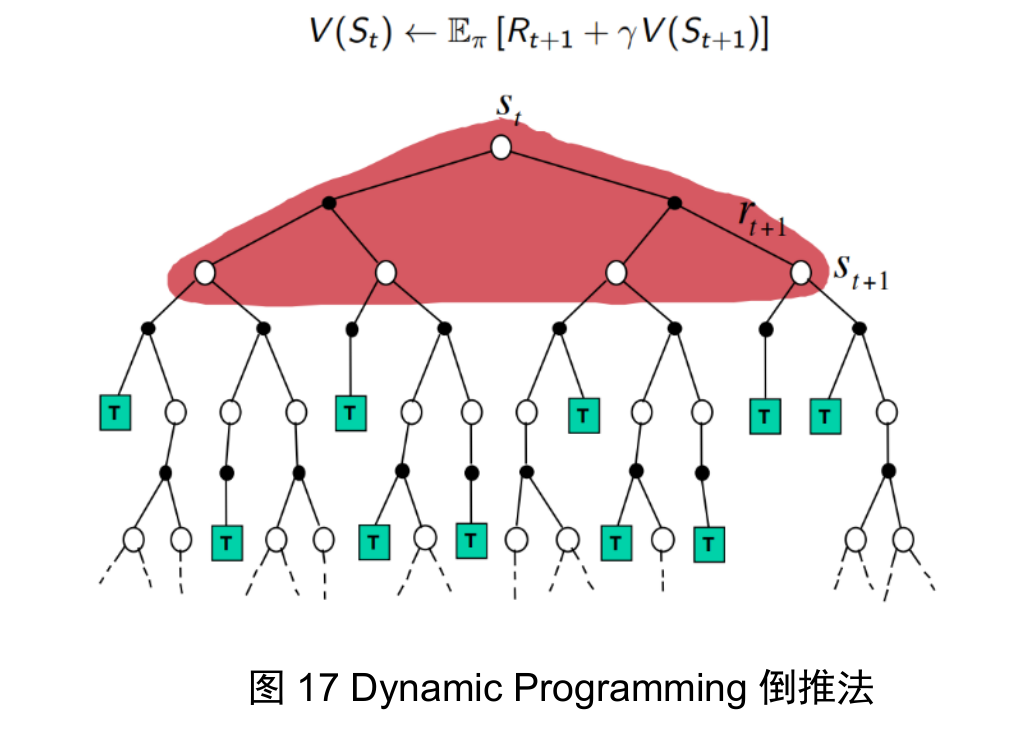
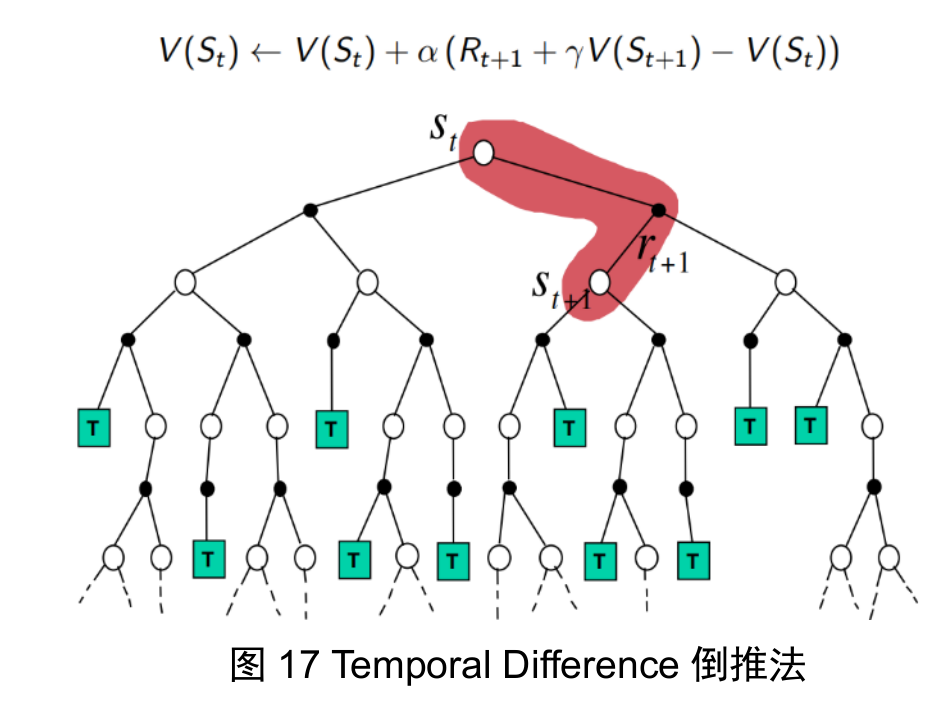
what is the ‘true’ value?
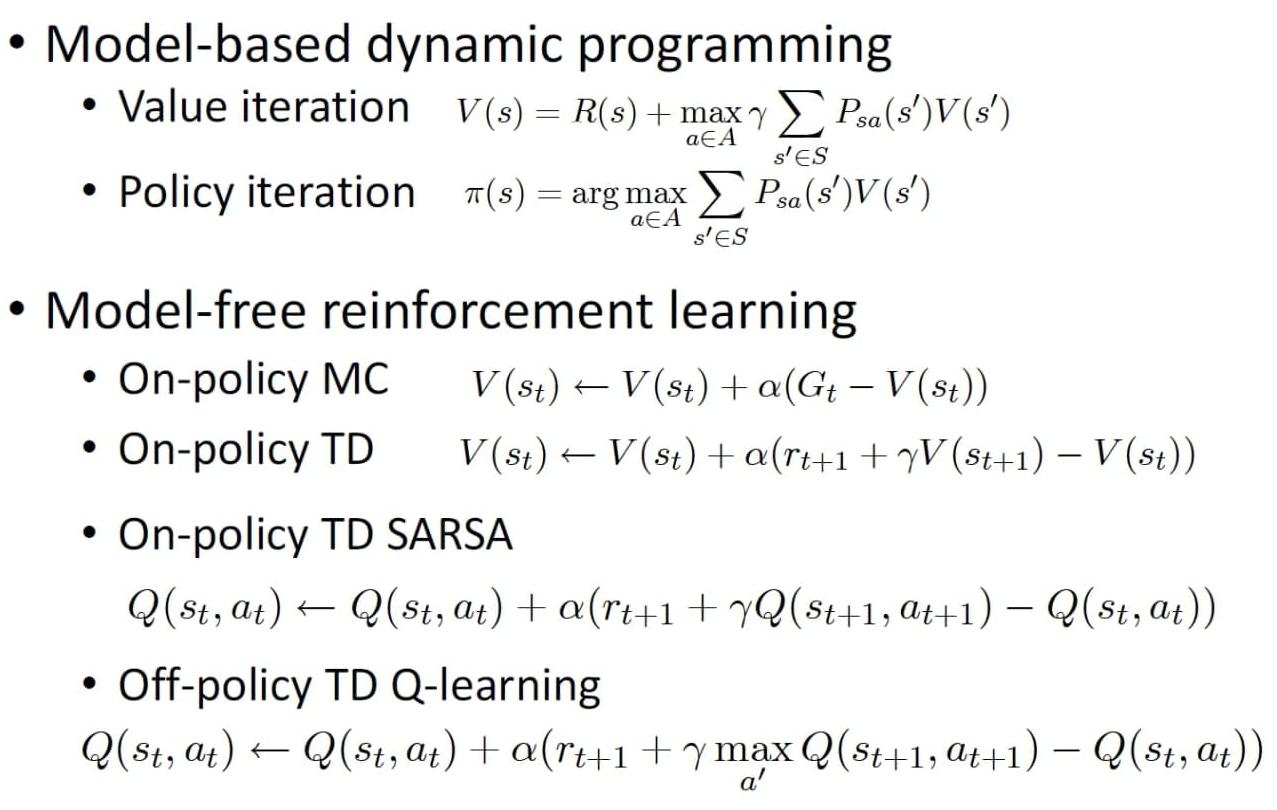
dynamic programing
the true value is the expectation over multiple episodes
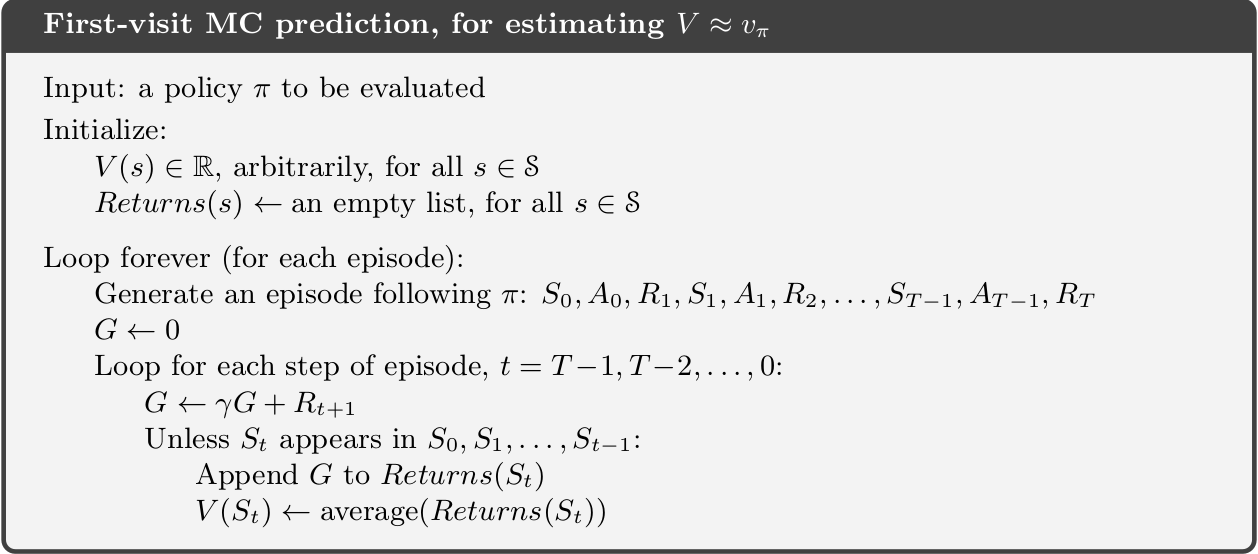
monte carlo
the true value is the data collected from an episode
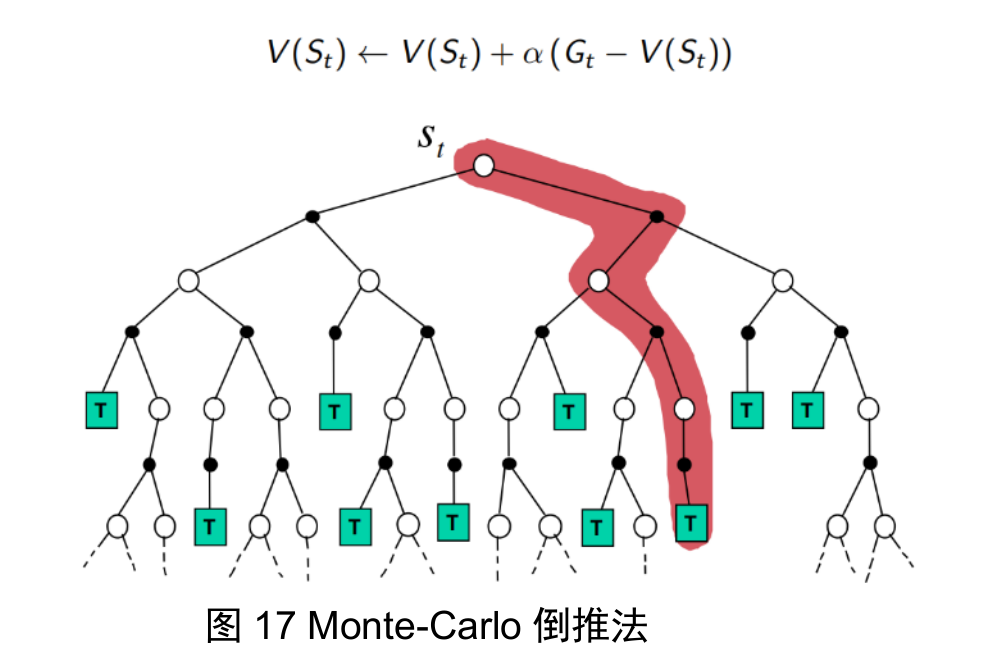
temporal difference
the true value is the realized reward of one step
People who works on incorporating rl with control
- Russ Tedrake youtube website
- Sergey Levin lecture
- Pieter Abbeel lecture cs287
- Ben Recht website L4DC
- Shi Guanya website
- Francesco Borrelli lab
- 11-785
- CS480
- David Duvenaud He is knowm for his works on Neural ODE and Latent SDE
- Nathan Kutz Data-drivern Sceince and Engineering.
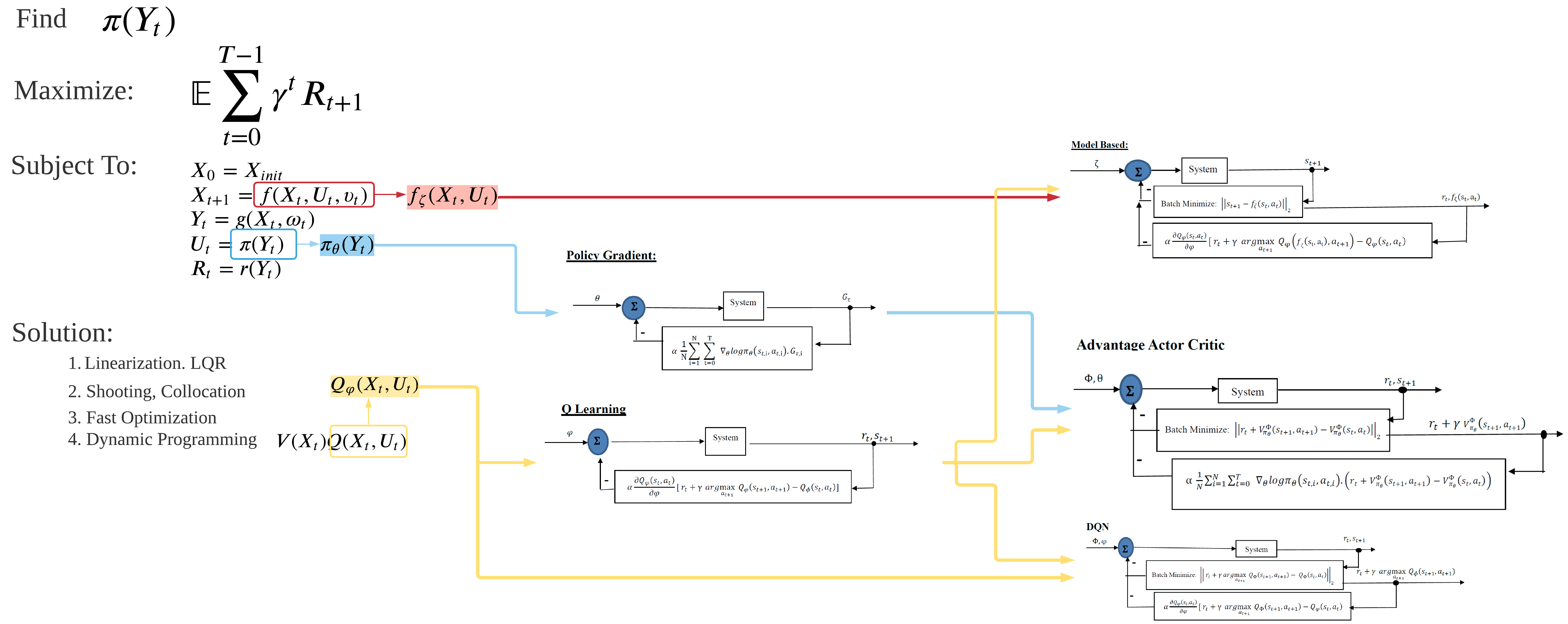
algorithms
overview
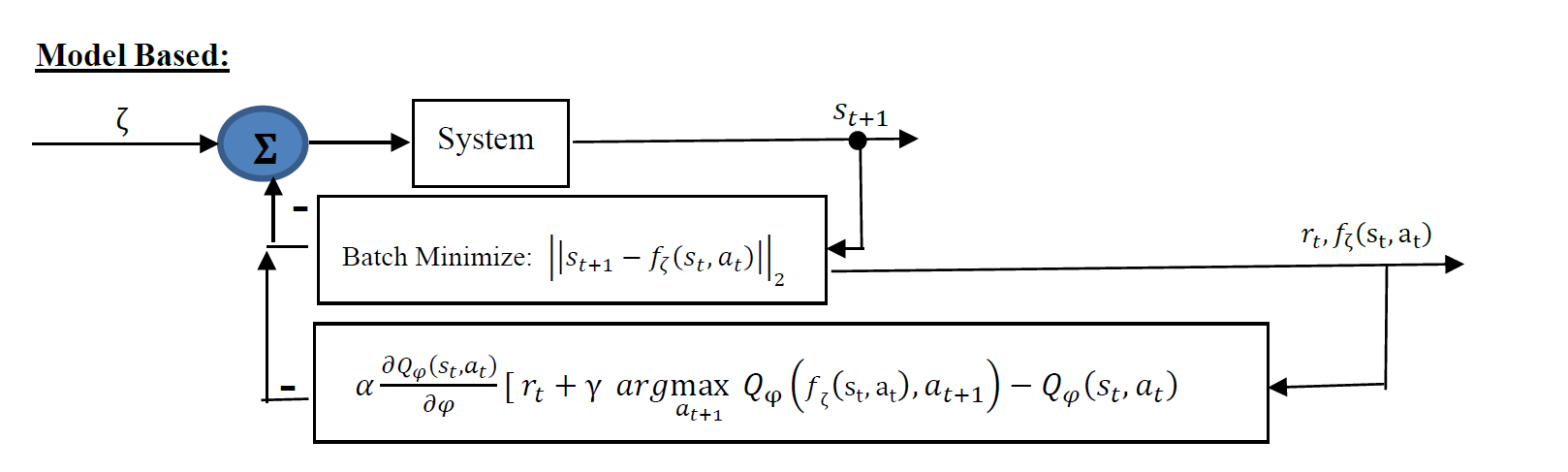
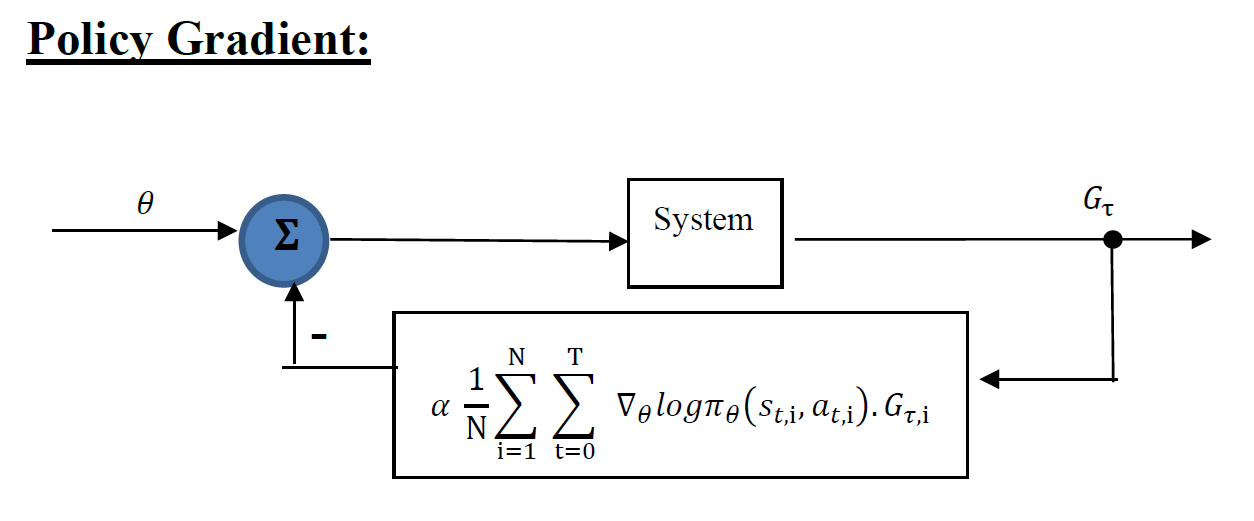
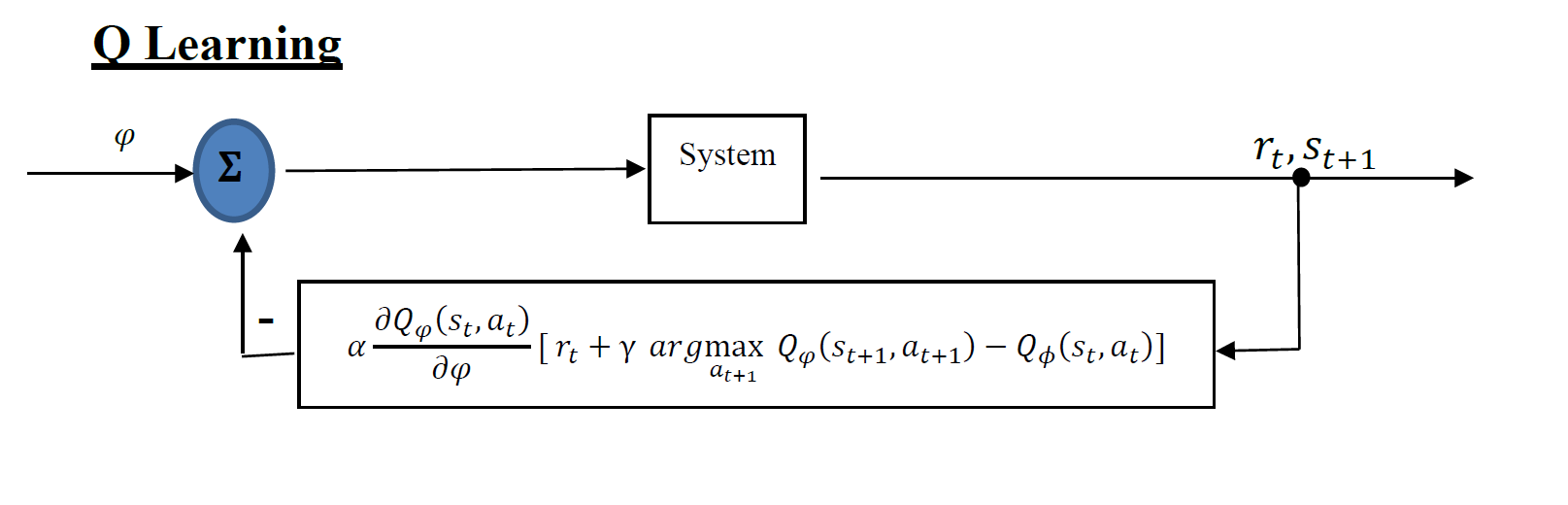
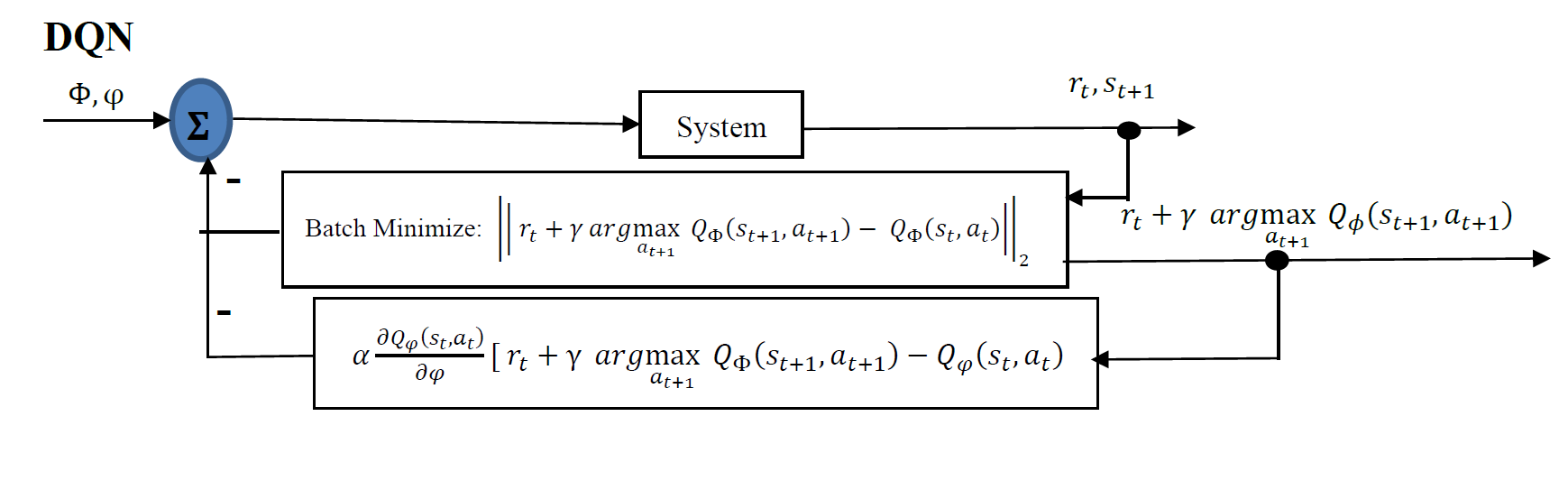
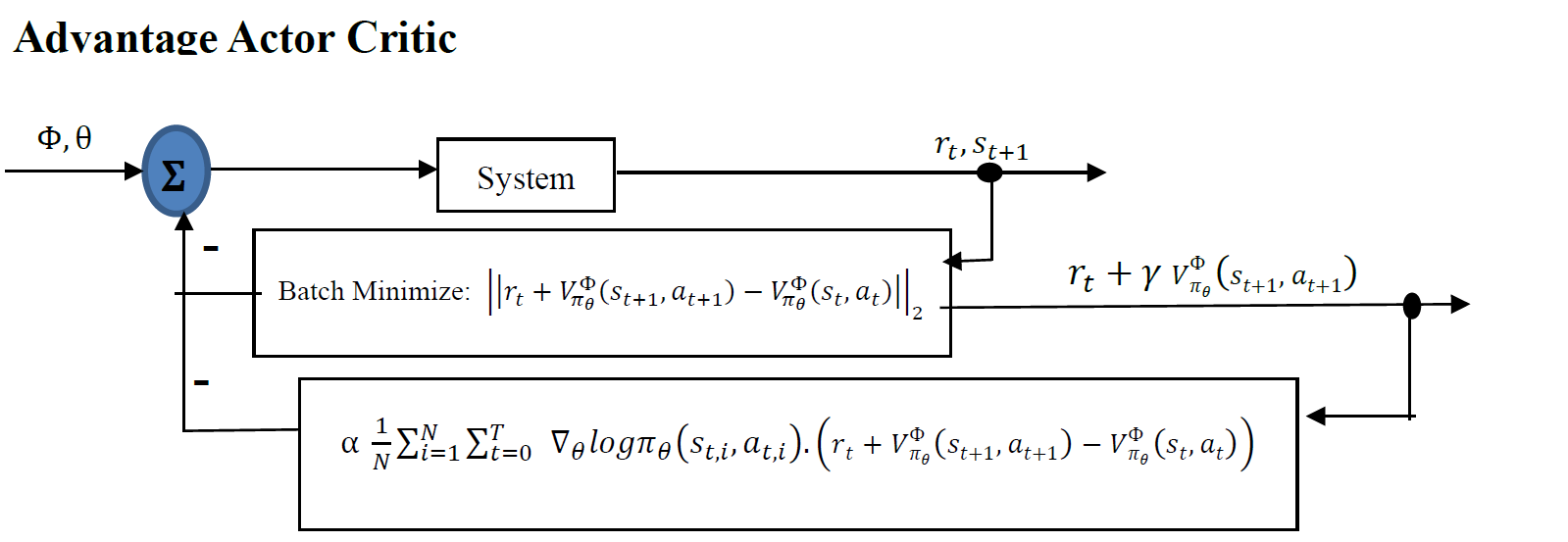
feedback block diagram view
model based learning
policy gradient
value based learning (cost to go)
bring it all together
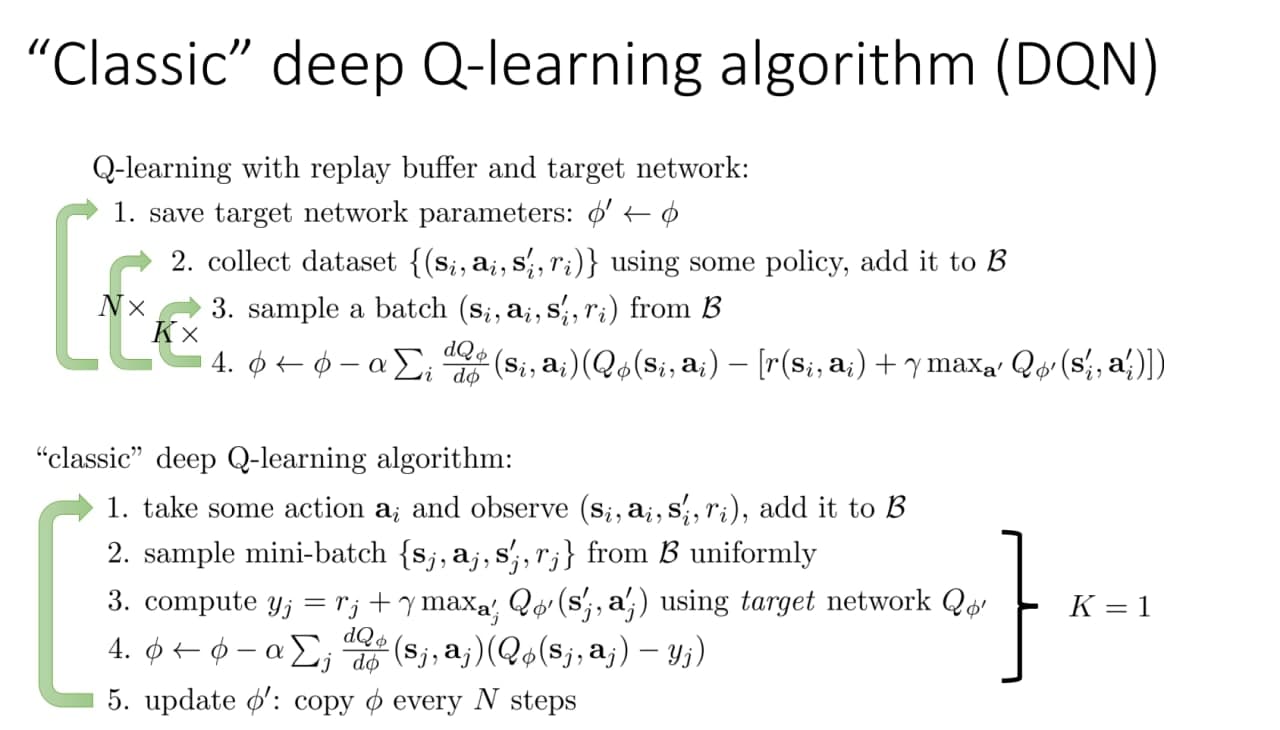
pseudoalg view
code realization view
Policy Evaluation
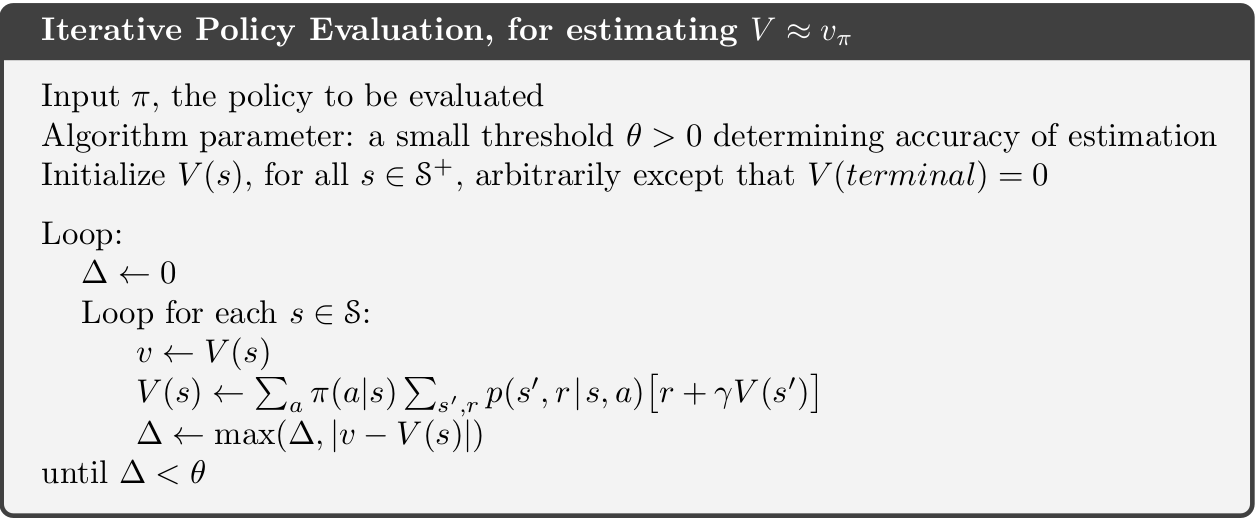
You’re now ready to begin the assignment! First, the city council would like you to evaluate the quality of the existing pricing scheme. Policy evaluation works by iteratively applying the Bellman equation for \(v_{\pi}\) to a working value function, as an update rule, as shown below.
\(\large v(s) \leftarrow \sum_a \pi(a | s) \sum_{s', r} p(s', r | s, a)[r + \gamma v(s')]\) This update can either occur “in-place” (i.e. the update rule is sequentially applied to each state) or with “two-arrays” (i.e. the update rule is simultaneously applied to each state). Both versions converge to \(v_{\pi}\) but the in-place version usually converges faster. In this assignment, we will be implementing all update rules in-place, as is done in the pseudocode of chapter 4 of the textbook.
We have written an outline of the policy evaluation algorithm described in chapter 4.1 of the textbook. It is left to you to fill in the bellman_update function to complete the algorithm.
def bellman_update(env, V, pi, s, gamma):
v = 0
for a in env.A:
transitions = env.transitions(s, a)
for s_, (r, p) in enumerate(transitions):
v += pi[s][a] * p * (r + gamma * V[s_])
V[s] = v
def evaluate_policy(env, V, pi, gamma, theta):
while True:
delta = 0
for s in env.S:
v = V[s]
bellman_update(env, V, pi, s, gamma)
delta = max(delta, abs(v - V[s]))
if delta < theta: #if the improvement becomes too small, abandand update
break
return V
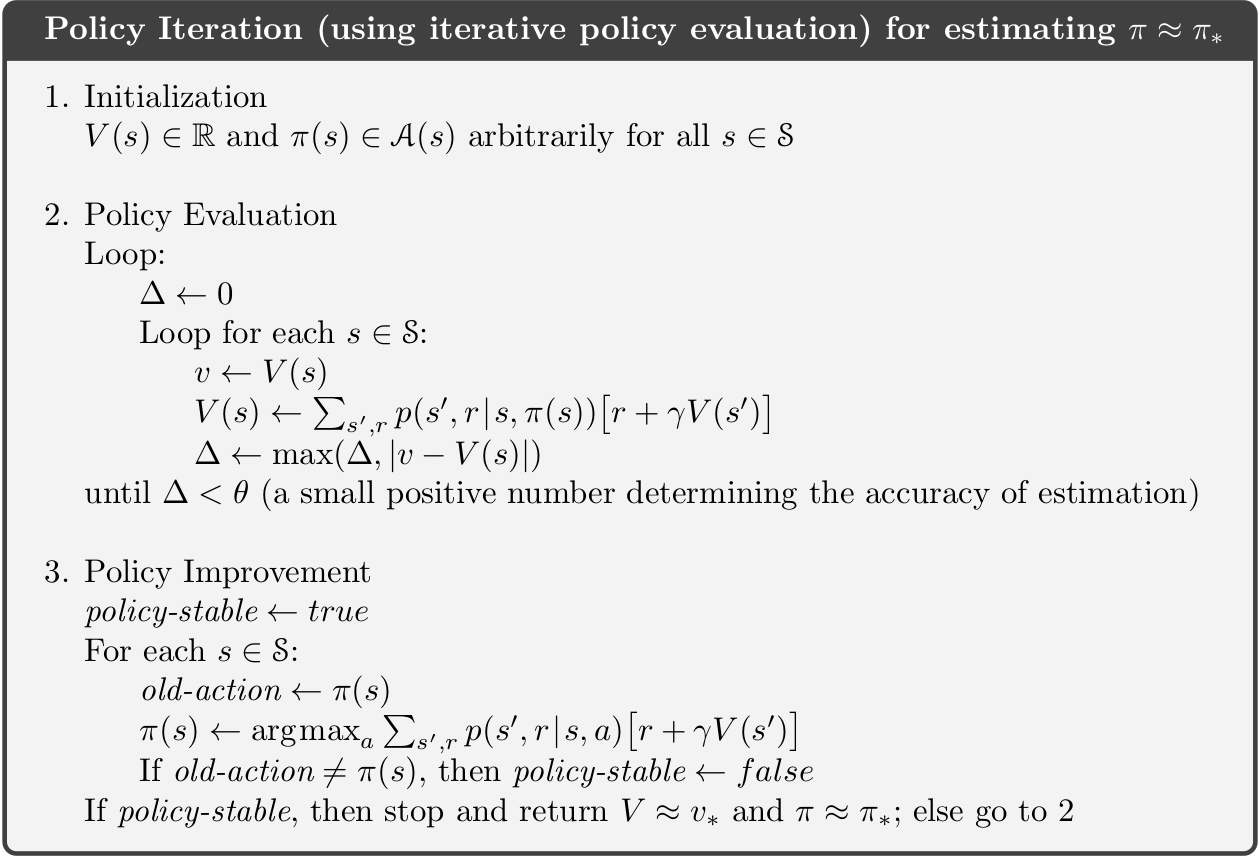
Policy Iteration
Policy iteration works by alternating between evaluating the existing policy and making the policy greedy with respect to the existing value function. We have written an outline of the policy iteration algorithm described in chapter 4.3 of the textbook. We will make use of the policy evaluation algorithm you completed in section 1. It is left to you to fill in the q_greedify_policy function, such that it modifies the policy at s to be greedy with respect to the q-values at s, to complete the policy improvement algorithm.
def q_greedify_policy(env, V, pi, s, gamma):
q = np.zeros_like(env.A, dtype=float) #because this is an array of float
for a in env.A:
transitions = env.transitions(s, a)
for s_, (r, p) in enumerate(transitions):
q[a] += p * (r + gamma * V[s_])
greed_actions = np.argwhere(q == np.amax(q))
for a in env.A:
if a in greed_actions:
pi[s, a] = 1 / len(greed_actions)
else:
pi[s, a] = 0
def improve_policy(env, V, pi, gamma):
policy_stable = True
for s in env.S:
old = pi[s].copy()
q_greedify_policy(env, V, pi, s, gamma)
if not np.array_equal(pi[s], old):
policy_stable = False
return pi, policy_stable
def policy_iteration(env, gamma, theta):
V = np.zeros(len(env.S))
pi = np.ones((len(env.S), len(env.A))) / len(env.A)
policy_stable = False
while not policy_stable:
V = evaluate_policy(env, V, pi, gamma, theta)
pi, policy_stable = improve_policy(env, V, pi, gamma)
return V, pi
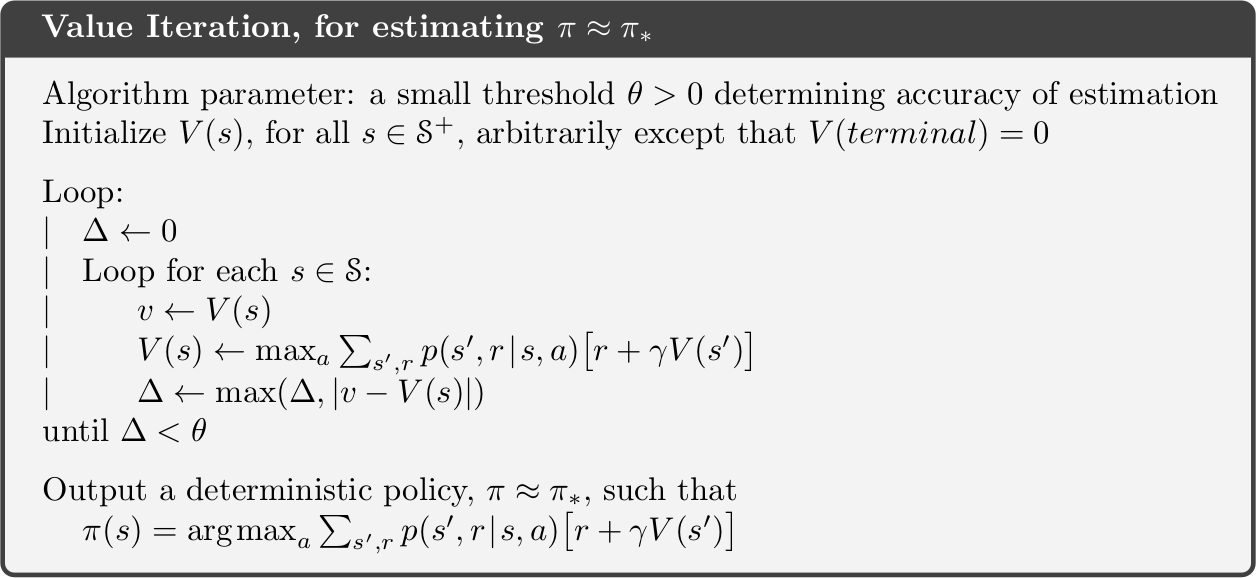
Value Iteration
Value iteration works by iteratively applying the Bellman optimality equation for \(v_{\ast}\) to a working value function, as an update rule, as shown below.
\(\large v(s) \leftarrow \max_a \sum_{s', r} p(s', r | s, a)[r + \gamma v(s')]\)
We have written an outline of the value iteration algorithm described in chapter 4.4 of the textbook. It is left to you to fill in the bellman_optimality_update function to complete the value iteration algorithm.
def bellman_optimality_update(env, V, s, gamma):
vmax = - float('inf')#starting from negative infinity
for a in env.A:
transitions = env.transitions(s, a)
v = 0
for s_, (r, p) in enumerate(transitions):
v += p * (r + gamma * V[s_])
vmax = max(v, vmax)
V[s] = vmax
def value_iteration(env, gamma, theta):
V = np.zeros(len(env.S))
while True:
delta = 0
for s in env.S:
v = V[s]
bellman_optimality_update(env, V, s, gamma)
delta = max(delta, abs(v - V[s]))
if delta < theta:
break
pi = np.ones((len(env.S), len(env.A))) / len(env.A)
for s in env.S:
q_greedify_policy(env, V, pi, s, gamma)
return V, pi
Dyna-Q
First of all, check out the agent_init method below. As in earlier assignments, some of the attributes are initialized with the data passed inside agent_info. In particular, pay attention to the attributes which are new to DynaQAgent, since you shall be using them later.
# Do not modify this cell!
class DynaQAgent(BaseAgent):
def agent_init(self, agent_info):
"""Setup for the agent called when the experiment first starts.
Args:
agent_init_info (dict), the parameters used to initialize the agent. The dictionary contains:
{
num_states (int): The number of states,
num_actions (int): The number of actions,
epsilon (float): The parameter for epsilon-greedy exploration,
step_size (float): The step-size,
discount (float): The discount factor,
planning_steps (int): The number of planning steps per environmental interaction
random_seed (int): the seed for the RNG used in epsilon-greedy
planning_random_seed (int): the seed for the RNG used in the planner
}
"""
# First, we get the relevant information from agent_info
# NOTE: we use np.random.RandomState(seed) to set the two different RNGs
# for the planner and the rest of the code
try:
self.num_states = agent_info["num_states"]
self.num_actions = agent_info["num_actions"]
except:
print("You need to pass both 'num_states' and 'num_actions' \
in agent_info to initialize the action-value table")
self.gamma = agent_info.get("discount", 0.95)
self.step_size = agent_info.get("step_size", 0.1)
self.epsilon = agent_info.get("epsilon", 0.1)
self.planning_steps = agent_info.get("planning_steps", 10)
self.rand_generator = np.random.RandomState(agent_info.get('random_seed', 42))
self.planning_rand_generator = np.random.RandomState(agent_info.get('planning_random_seed', 42))
# Next, we initialize the attributes required by the agent, e.g., q_values, model, etc.
# A simple way to implement the model is to have a dictionary of dictionaries,
# mapping each state to a dictionary which maps actions to (reward, next state) tuples.
self.q_values = np.zeros((self.num_states, self.num_actions))
self.actions = list(range(self.num_actions))
self.past_action = -1
self.past_state = -1
self.model = {} # model is a dictionary of dictionaries, which maps states to actions to
# (reward, next_state) tuples
Now let’s create the update_model method, which performs the ‘Model Update’ step in the pseudocode. It takes a (s, a, s', r) tuple and stores the next state and reward corresponding to a state-action pair.
Remember, because the environment is deterministic, an easy way to implement the model is to have a dictionary of encountered states, each mapping to a dictionary of actions taken in those states, which in turn maps to a tuple of next state and reward. In this way, the model can be easily accessed by model[s][a], which would return the (s', r) tuple.
%%add_to DynaQAgent
# [GRADED]
def update_model(self, past_state, past_action, state, reward):
"""updates the model
Args:
past_state (int): s
past_action (int): a
state (int): s'
reward (int): r
Returns:
Nothing
"""
# Update the model with the (s,a,s',r) tuple (1~4 lines)
### START CODE HERE ###
self.model[past_state] = self.model.get(past_state, {})
self.model[past_state][past_action] = state, reward
### END CODE HERE ###
Test update_model()
# Do not modify this cell!
## Test code for update_model() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQAgent()
test_agent.agent_init(agent_info)
test_agent.update_model(0,2,0,1)
test_agent.update_model(2,0,1,1)
test_agent.update_model(0,3,1,2)
print("Model: \n", test_agent.model)
Model:
{0: {2: (0, 1), 3: (1, 2)}, 2: {0: (1, 1)}}
Expected output:
Model:
{0: {2: (0, 1), 3: (1, 2)}, 2: {0: (1, 1)}}
Next, you will implement the planning step, the crux of the Dyna-Q algorithm. You shall be calling this planning_step method at every timestep of every trajectory.
%%add_to DynaQAgent
# [GRADED]
def planning_step(self):
"""performs planning, i.e. indirect RL.
Args:
None
Returns:
Nothing
"""
# The indirect RL step:
# - Choose a state and action from the set of experiences that are stored in the model. (~2 lines)
# - Query the model with this state-action pair for the predicted next state and reward.(~1 line)
# - Update the action values with this simulated experience. (2~4 lines)
# - Repeat for the required number of planning steps.
#
# Note that the update equation is different for terminal and non-terminal transitions.
# To differentiate between a terminal and a non-terminal next state, assume that the model stores
# the terminal state as a dummy state like -1
#
# Important: remember you have a random number generator 'planning_rand_generator' as
# a part of the class which you need to use as self.planning_rand_generator.choice()
# For the sake of reproducibility and grading, *do not* use anything else like
# np.random.choice() for performing search control.
### START CODE HERE ###
for i in range(self.planning_steps):
past_state = self.planning_rand_generator.choice(list(self.model.keys()))
past_action = self.planning_rand_generator.choice(list(self.model[past_state].keys()))
next_state, reward = self.model[past_state][past_action]
if next_state == -1:
q_max = 0
else:
q_max = np.max(self.q_values[next_state])
self.q_values[past_state, past_action] += self.step_size * (reward + self.gamma * q_max
- self.q_values[past_state, past_action])
### END CODE HERE ###
Test planning_step()
# Do not modify this cell!
## Test code for planning_step() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"planning_steps": 4,
"random_seed": 0,
"planning_random_seed": 5}
test_agent = DynaQAgent()
test_agent.agent_init(agent_info)
test_agent.update_model(0,2,1,1)
test_agent.update_model(2,0,1,1)
test_agent.update_model(0,3,0,1)
test_agent.update_model(0,1,-1,1)
test_agent.planning_step()
print("Model: \n", test_agent.model)
print("Action-value estimates: \n", test_agent.q_values)
Model:
{0: {2: (1, 1), 3: (0, 1), 1: (-1, 1)}, 2: {0: (1, 1)}}
Action-value estimates:
[[0. 0.1 0. 0.2]
[0. 0. 0. 0. ]
[0.1 0. 0. 0. ]]
Expected output:
Model:
{0: {2: (1, 1), 3: (0, 1), 1: (-1, 1)}, 2: {0: (1, 1)}}
Action-value estimates:
[[0. 0.1 0. 0.2 ]
[0. 0. 0. 0. ]
[0.1 0. 0. 0. ]]
If your output does not match the above, one of the first things to check is to make sure that you haven’t changed the planning_random_seed in the test cell. Additionally, make sure you have handled terminal updates correctly.
Now before you move on to implement the rest of the agent methods, here are the helper functions that you’ve used in the previous assessments for choosing an action using an $\epsilon$-greedy policy.
%%add_to DynaQAgent
# Do not modify this cell!
def argmax(self, q_values):
"""argmax with random tie-breaking
Args:
q_values (Numpy array): the array of action values
Returns:
action (int): an action with the highest value
"""
top = float("-inf")
ties = []
for i in range(len(q_values)):
if q_values[i] > top:
top = q_values[i]
ties = []
if q_values[i] == top:
ties.append(i)
return self.rand_generator.choice(ties)
def choose_action_egreedy(self, state):
"""returns an action using an epsilon-greedy policy w.r.t. the current action-value function.
Important: assume you have a random number generator 'rand_generator' as a part of the class
which you can use as self.rand_generator.choice() or self.rand_generator.rand()
Args:
state (List): coordinates of the agent (two elements)
Returns:
The action taken w.r.t. the aforementioned epsilon-greedy policy
"""
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.choice(self.actions)
else:
values = self.q_values[state]
action = self.argmax(values)
return action
Next, you will implement the rest of the agent-related methods, namely agent_start, agent_step, and agent_end.
%%add_to DynaQAgent
# [GRADED]
def agent_start(self, state):
"""The first method called when the experiment starts,
called after the environment starts.
Args:
state (Numpy array): the state from the
environment's env_start function.
Returns:
(int) the first action the agent takes.
"""
# given the state, select the action using self.choose_action_egreedy()),
# and save current state and action (~2 lines)
### self.past_state = ?
### self.past_action = ?
### START CODE HERE ###
action = self.choose_action_egreedy(state)
self.past_state = state
self.past_action = action
### END CODE HERE ###
return self.past_action
def agent_step(self, reward, state):
"""A step taken by the agent.
Args:
reward (float): the reward received for taking the last action taken
state (Numpy array): the state from the
environment's step based on where the agent ended up after the
last step
Returns:
(int) The action the agent takes given this state.
"""
# - Direct-RL step (~1-3 lines)
# - Model Update step (~1 line)
# - `planning_step` (~1 line)
# - Action Selection step (~1 line)
# Save the current state and action before returning the action to be performed. (~2 lines)
### START CODE HERE ###
# Direct-RL step
q_max = np.max(self.q_values[state])
self.q_values[self.past_state, self.past_action] += self.step_size * (reward + self.gamma * q_max
- self.q_values[self.past_state, self.past_action])
# Model Update step
self.update_model(self.past_state, self.past_action, state, reward)
# Planning
self.planning_step()
# Choose Action
action = self.choose_action_egreedy(state)
# Save the current state and action
self.past_state = state
self.past_action = action
### END CODE HERE ###
return self.past_action
def agent_end(self, reward):
"""Called when the agent terminates.
Args:
reward (float): the reward the agent received for entering the
terminal state.
"""
# - Direct RL update with this final transition (1~2 lines)
# - Model Update step with this final transition (~1 line)
# - One final `planning_step` (~1 line)
#
# Note: the final transition needs to be handled carefully. Since there is no next state,
# you will have to pass a dummy state (like -1), which you will be using in the planning_step() to
# differentiate between updates with usual terminal and non-terminal transitions.
### START CODE HERE ###
# Direct-RL step
self.q_values[self.past_state, self.past_action] += self.step_size * (reward
- self.q_values[self.past_state, self.past_action])
# Model Update step
self.update_model(self.past_state, self.past_action, -1, reward)
# Planning
self.planning_step()
### END CODE HERE ###
Test agent_start()
# Do not modify this cell!
## Test code for agent_start() ##
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQAgent()
test_agent.agent_init(agent_info)
action = test_agent.agent_start(0)
print("Action:", action)
print("Model: \n", test_agent.model)
print("Action-value estimates: \n", test_agent.q_values)
Action: 1
Model:
{}
Action-value estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Expected output:
Action: 1
Model:
{}
Action-value estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Test agent_step()
# Do not modify this cell!
## Test code for agent_step() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"planning_steps": 2,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQAgent()
test_agent.agent_init(agent_info)
actions.append(test_agent.agent_start(0))
actions.append(test_agent.agent_step(1,2))
actions.append(test_agent.agent_step(0,1))
print("Actions:", actions)
print("Model: \n", test_agent.model)
print("Action-value estimates: \n", test_agent.q_values)
Actions: [1, 3, 1]
Model:
{0: {1: (2, 1)}, 2: {3: (1, 0)}}
Action-value estimates:
[[0. 0.3439 0. 0. ]
[0. 0. 0. 0. ]
[0. 0. 0. 0. ]]
Expected output:
Actions: [1, 3, 1]
Model:
{0: {1: (2, 1)}, 2: {3: (1, 0)}}
Action-value estimates:
[[0. 0.3439 0. 0. ]
[0. 0. 0. 0. ]
[0. 0. 0. 0. ]]
Test agent_end()
# Do not modify this cell!
## Test code for agent_end() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"planning_steps": 2,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQAgent()
test_agent.agent_init(agent_info)
actions.append(test_agent.agent_start(0))
actions.append(test_agent.agent_step(1,2))
actions.append(test_agent.agent_step(0,1))
test_agent.agent_end(1)
print("Actions:", actions)
print("Model: \n", test_agent.model)
print("Action-value Estimates: \n", test_agent.q_values)
Actions: [1, 3, 1]
Model:
{0: {1: (2, 1)}, 2: {3: (1, 0)}, 1: {1: (-1, 1)}}
Action-value Estimates:
[[0. 0.41051 0. 0. ]
[0. 0.1 0. 0. ]
[0. 0. 0. 0.01 ]]
Expected output:
Actions: [1, 3, 1]
Model:
{0: {1: (2, 1)}, 2: {3: (1, 0)}, 1: {1: (-1, 1)}}
Action-value Estimates:
[[0. 0.41051 0. 0. ]
[0. 0.1 0. 0. ]
[0. 0. 0. 0.01 ]]
Experiment: Dyna-Q agent in the maze environment
Alright. Now we have all the components of the DynaQAgent ready. Let’s try it out on the maze environment!
The next cell runs an experiment on this maze environment to test your implementation. The initial action values are $0$, the step-size parameter is $0.125$. and the exploration parameter is $\epsilon=0.1$. After the experiment, the sum of rewards in each episode should match the correct result.
We will try planning steps of $0,5,50$ and compare their performance in terms of the average number of steps taken to reach the goal state in the aforementioned maze environment. For scientific rigor, we will run each experiment $30$ times. In each experiment, we set the initial random-number-generator (RNG) seeds for a fair comparison across algorithms.
# Do not modify this cell!
def run_experiment(env, agent, env_parameters, agent_parameters, exp_parameters):
# Experiment settings
num_runs = exp_parameters['num_runs']
num_episodes = exp_parameters['num_episodes']
planning_steps_all = agent_parameters['planning_steps']
env_info = env_parameters
agent_info = {"num_states" : agent_parameters["num_states"], # We pass the agent the information it needs.
"num_actions" : agent_parameters["num_actions"],
"epsilon": agent_parameters["epsilon"],
"discount": env_parameters["discount"],
"step_size" : agent_parameters["step_size"]}
all_averages = np.zeros((len(planning_steps_all), num_runs, num_episodes)) # for collecting metrics
log_data = {'planning_steps_all' : planning_steps_all} # that shall be plotted later
for idx, planning_steps in enumerate(planning_steps_all):
print('Planning steps : ', planning_steps)
os.system('sleep 0.5') # to prevent tqdm printing out-of-order before the above print()
agent_info["planning_steps"] = planning_steps
for i in tqdm(range(num_runs)):
agent_info['random_seed'] = i
agent_info['planning_random_seed'] = i
rl_glue = RLGlue(env, agent) # Creates a new RLGlue experiment with the env and agent we chose above
rl_glue.rl_init(agent_info, env_info) # We pass RLGlue what it needs to initialize the agent and environment
for j in range(num_episodes):
rl_glue.rl_start() # We start an episode. Here we aren't using rl_glue.rl_episode()
# like the other assessments because we'll be requiring some
is_terminal = False # data from within the episodes in some of the experiments here
num_steps = 0
while not is_terminal:
reward, _, action, is_terminal = rl_glue.rl_step() # The environment and agent take a step
num_steps += 1 # and return the reward and action taken.
all_averages[idx][i][j] = num_steps
log_data['all_averages'] = all_averages
np.save("results/Dyna-Q_planning_steps", log_data)
def plot_steps_per_episode(file_path):
data = np.load(file_path).item()
all_averages = data['all_averages']
planning_steps_all = data['planning_steps_all']
for i, planning_steps in enumerate(planning_steps_all):
plt.plot(np.mean(all_averages[i], axis=0), label='Planning steps = '+str(planning_steps))
plt.legend(loc='upper right')
plt.xlabel('Episodes')
plt.ylabel('Steps\nper\nepisode', rotation=0, labelpad=40)
plt.axhline(y=16, linestyle='--', color='grey', alpha=0.4)
plt.show()
# Do NOT modify the parameter settings.
# Experiment parameters
experiment_parameters = {
"num_runs" : 30, # The number of times we run the experiment
"num_episodes" : 40, # The number of episodes per experiment
}
# Environment parameters
environment_parameters = {
"discount": 0.95,
}
# Agent parameters
agent_parameters = {
"num_states" : 54,
"num_actions" : 4,
"epsilon": 0.1,
"step_size" : 0.125,
"planning_steps" : [0, 5, 50] # The list of planning_steps we want to try
}
current_env = ShortcutMazeEnvironment # The environment
current_agent = DynaQAgent # The agent
run_experiment(current_env, current_agent, environment_parameters, agent_parameters, experiment_parameters)
plot_steps_per_episode('results/Dyna-Q_planning_steps.npy')
shutil.make_archive('results', 'zip', 'results');
Planning steps : 0
100%|██████████| 30/30 [00:04<00:00, 6.73it/s]
Planning steps : 5
100%|██████████| 30/30 [00:05<00:00, 5.68it/s]
Planning steps : 50
100%|██████████| 30/30 [00:36<00:00, 1.22s/it]
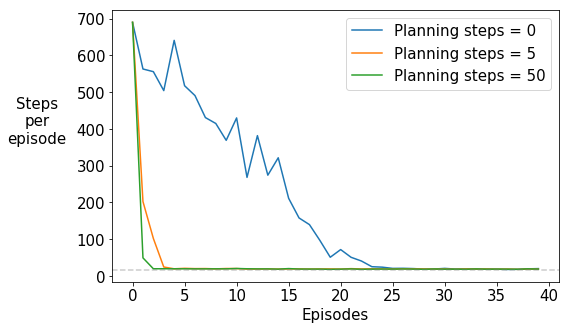
What do you notice?
As the number of planning steps increases, the number of episodes taken to reach the goal decreases rapidly. Remember that the RNG seed was set the same for all the three values of planning steps, resulting in the same number of steps taken to reach the goal in the first episode. Thereafter, the performance improves. The slowest improvement is when there are $n=0$ planning steps, i.e., for the non-planning Q-learning agent, even though the step size parameter was optimized for it. Note that the grey dotted line shows the minimum number of steps required to reach the goal state under the optimal greedy policy.
Experiment(s): Dyna-Q agent in the changing maze environment
Great! Now let us see how Dyna-Q performs on the version of the maze in which a shorter path opens up after 3000 steps. The rest of the transition and reward dynamics remain the same.

Before you proceed, take a moment to think about what you expect to see. Will Dyna-Q find the new, shorter path to the goal? If so, why? If not, why not?
# Do not modify this cell!
def run_experiment_with_state_visitations(env, agent, env_parameters, agent_parameters, exp_parameters, result_file_name):
# Experiment settings
num_runs = exp_parameters['num_runs']
num_max_steps = exp_parameters['num_max_steps']
planning_steps_all = agent_parameters['planning_steps']
env_info = {"change_at_n" : env_parameters["change_at_n"]}
agent_info = {"num_states" : agent_parameters["num_states"],
"num_actions" : agent_parameters["num_actions"],
"epsilon": agent_parameters["epsilon"],
"discount": env_parameters["discount"],
"step_size" : agent_parameters["step_size"]}
state_visits_before_change = np.zeros((len(planning_steps_all), num_runs, 54)) # For saving the number of
state_visits_after_change = np.zeros((len(planning_steps_all), num_runs, 54)) # state-visitations
cum_reward_all = np.zeros((len(planning_steps_all), num_runs, num_max_steps)) # For saving the cumulative reward
log_data = {'planning_steps_all' : planning_steps_all}
for idx, planning_steps in enumerate(planning_steps_all):
print('Planning steps : ', planning_steps)
os.system('sleep 1') # to prevent tqdm printing out-of-order before the above print()
agent_info["planning_steps"] = planning_steps # We pass the agent the information it needs.
for run in tqdm(range(num_runs)):
agent_info['random_seed'] = run
agent_info['planning_random_seed'] = run
rl_glue = RLGlue(env, agent) # Creates a new RLGlue experiment with the env and agent we chose above
rl_glue.rl_init(agent_info, env_info) # We pass RLGlue what it needs to initialize the agent and environment
num_steps = 0
cum_reward = 0
while num_steps < num_max_steps-1 :
state, _ = rl_glue.rl_start() # We start the experiment. We'll be collecting the
is_terminal = False # state-visitation counts to visiualize the learned policy
if num_steps < env_parameters["change_at_n"]:
state_visits_before_change[idx][run][state] += 1
else:
state_visits_after_change[idx][run][state] += 1
while not is_terminal and num_steps < num_max_steps-1 :
reward, state, action, is_terminal = rl_glue.rl_step()
num_steps += 1
cum_reward += reward
cum_reward_all[idx][run][num_steps] = cum_reward
if num_steps < env_parameters["change_at_n"]:
state_visits_before_change[idx][run][state] += 1
else:
state_visits_after_change[idx][run][state] += 1
log_data['state_visits_before'] = state_visits_before_change
log_data['state_visits_after'] = state_visits_after_change
log_data['cum_reward_all'] = cum_reward_all
np.save("results/" + result_file_name, log_data)
def plot_cumulative_reward(file_path, item_key, y_key, y_axis_label, legend_prefix, title):
data_all = np.load(file_path).item()
data_y_all = data_all[y_key]
items = data_all[item_key]
for i, item in enumerate(items):
plt.plot(np.mean(data_y_all[i], axis=0), label=legend_prefix+str(item))
plt.axvline(x=3000, linestyle='--', color='grey', alpha=0.4)
plt.xlabel('Timesteps')
plt.ylabel(y_axis_label, rotation=0, labelpad=60)
plt.legend(loc='upper left')
plt.title(title)
plt.show()
Did you notice that the environment changes after a fixed number of steps and not episodes?
This is because the environment is separate from the agent, and the environment changes irrespective of the length of each episode (i.e., the number of environmental interactions per episode) that the agent perceives. And hence we are now plotting the data per step or interaction of the agent and the environment, in order to comfortably see the differences in the behaviours of the agents before and after the environment changes.
Okay, now we will first plot the cumulative reward obtained by the agent per interaction with the environment, averaged over 10 runs of the experiment on this changing world.
# Do NOT modify the parameter settings.
# Experiment parameters
experiment_parameters = {
"num_runs" : 10, # The number of times we run the experiment
"num_max_steps" : 6000, # The number of steps per experiment
}
# Environment parameters
environment_parameters = {
"discount": 0.95,
"change_at_n": 3000
}
# Agent parameters
agent_parameters = {
"num_states" : 54,
"num_actions" : 4,
"epsilon": 0.1,
"step_size" : 0.125,
"planning_steps" : [5, 10, 50] # The list of planning_steps we want to try
}
current_env = ShortcutMazeEnvironment # The environment
current_agent = DynaQAgent # The agent
run_experiment_with_state_visitations(current_env, current_agent, environment_parameters, agent_parameters, experiment_parameters, "Dyna-Q_shortcut_steps")
plot_cumulative_reward('results/Dyna-Q_shortcut_steps.npy', 'planning_steps_all', 'cum_reward_all', 'Cumulative\nreward', 'Planning steps = ', 'Dyna-Q : Varying planning_steps')
Planning steps : 5
100%|██████████| 10/10 [00:06<00:00, 1.59it/s]
Planning steps : 10
100%|██████████| 10/10 [00:11<00:00, 1.13s/it]
Planning steps : 50
100%|██████████| 10/10 [00:50<00:00, 5.03s/it]
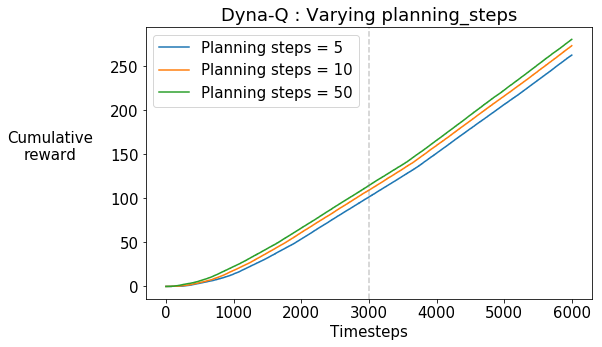
We observe that the slope of the curves is almost constant. If the agent had discovered the shortcut and begun using it, we would expect to see an increase in the slope of the curves towards the later stages of training. This is because the agent can get to the goal state faster and get the positive reward. Note that the timestep at which the shortcut opens up is marked by the grey dotted line.
Note that this trend is constant across the increasing number of planning steps.
Now let’s check the heatmap of the state visitations of the agent with planning_steps=10 during training, before and after the shortcut opens up after 3000 timesteps.
# Do not modify this cell!
def plot_state_visitations(file_path, plot_titles, idx):
data = np.load(file_path).item()
data_keys = ["state_visits_before", "state_visits_after"]
positions = [211,212]
titles = plot_titles
wall_ends = [None,-1]
for i in range(2):
state_visits = data[data_keys[i]][idx]
average_state_visits = np.mean(state_visits, axis=0)
grid_state_visits = np.rot90(average_state_visits.reshape((6,9)).T)
grid_state_visits[2,1:wall_ends[i]] = np.nan # walls
#print(average_state_visits.reshape((6,9)))
plt.subplot(positions[i])
plt.pcolormesh(grid_state_visits, edgecolors='gray', linewidth=1, cmap='viridis')
plt.text(3+0.5, 0+0.5, 'S', horizontalalignment='center', verticalalignment='center')
plt.text(8+0.5, 5+0.5, 'G', horizontalalignment='center', verticalalignment='center')
plt.title(titles[i])
plt.axis('off')
cm = plt.get_cmap()
cm.set_bad('gray')
plt.subplots_adjust(bottom=0.0, right=0.7, top=1.0)
cax = plt.axes([1., 0.0, 0.075, 1.])
cbar = plt.colorbar(cax=cax)
plt.show()
# Do not modify this cell!
plot_state_visitations("results/Dyna-Q_shortcut_steps.npy", ['Dyna-Q : State visitations before the env changes', 'Dyna-Q : State visitations after the env changes'], 1)
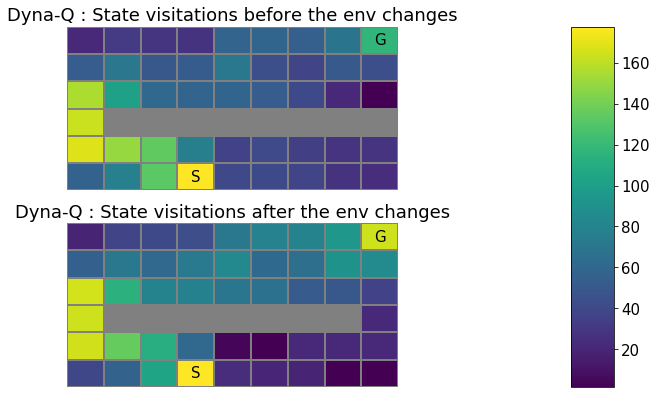
What do you observe?
The state visitation map looks almost the same before and after the shortcut opens. This means that the Dyna-Q agent hasn’t quite discovered and started exploiting the new shortcut.
Now let’s try increasing the exploration parameter $\epsilon$ to see if it helps the Dyna-Q agent discover the shortcut.
# Do not modify this cell!
def run_experiment_only_cumulative_reward(env, agent, env_parameters, agent_parameters, exp_parameters):
# Experiment settings
num_runs = exp_parameters['num_runs']
num_max_steps = exp_parameters['num_max_steps']
epsilons = agent_parameters['epsilons']
env_info = {"change_at_n" : env_parameters["change_at_n"]}
agent_info = {"num_states" : agent_parameters["num_states"],
"num_actions" : agent_parameters["num_actions"],
"planning_steps": agent_parameters["planning_steps"],
"discount": env_parameters["discount"],
"step_size" : agent_parameters["step_size"]}
log_data = {'epsilons' : epsilons}
cum_reward_all = np.zeros((len(epsilons), num_runs, num_max_steps))
for eps_idx, epsilon in enumerate(epsilons):
print('Agent : Dyna-Q, epsilon : %f' % epsilon)
os.system('sleep 1') # to prevent tqdm printing out-of-order before the above print()
agent_info["epsilon"] = epsilon
for run in tqdm(range(num_runs)):
agent_info['random_seed'] = run
agent_info['planning_random_seed'] = run
rl_glue = RLGlue(env, agent) # Creates a new RLGlue experiment with the env and agent we chose above
rl_glue.rl_init(agent_info, env_info) # We pass RLGlue what it needs to initialize the agent and environment
num_steps = 0
cum_reward = 0
while num_steps < num_max_steps-1 :
rl_glue.rl_start() # We start the experiment
is_terminal = False
while not is_terminal and num_steps < num_max_steps-1 :
reward, _, action, is_terminal = rl_glue.rl_step() # The environment and agent take a step and return
# the reward, and action taken.
num_steps += 1
cum_reward += reward
cum_reward_all[eps_idx][run][num_steps] = cum_reward
log_data['cum_reward_all'] = cum_reward_all
np.save("results/Dyna-Q_epsilons", log_data)
# Do NOT modify the parameter settings.
# Experiment parameters
experiment_parameters = {
"num_runs" : 30, # The number of times we run the experiment
"num_max_steps" : 6000, # The number of steps per experiment
}
# Environment parameters
environment_parameters = {
"discount": 0.95,
"change_at_n": 3000
}
# Agent parameters
agent_parameters = {
"num_states" : 54,
"num_actions" : 4,
"step_size" : 0.125,
"planning_steps" : 10,
"epsilons": [0.1, 0.2, 0.4, 0.8] # The list of epsilons we want to try
}
current_env = ShortcutMazeEnvironment # The environment
current_agent = DynaQAgent # The agent
run_experiment_only_cumulative_reward(current_env, current_agent, environment_parameters, agent_parameters, experiment_parameters)
plot_cumulative_reward('results/Dyna-Q_epsilons.npy', 'epsilons', 'cum_reward_all', 'Cumulative\nreward', r'$\epsilon$ = ', r'Dyna-Q : Varying $\epsilon$')
Agent : Dyna-Q, epsilon : 0.100000
100%|██████████| 30/30 [00:33<00:00, 1.13s/it]
Agent : Dyna-Q, epsilon : 0.200000
100%|██████████| 30/30 [00:33<00:00, 1.13s/it]
Agent : Dyna-Q, epsilon : 0.400000
100%|██████████| 30/30 [00:33<00:00, 1.12s/it]
Agent : Dyna-Q, epsilon : 0.800000
100%|██████████| 30/30 [00:33<00:00, 1.11s/it]
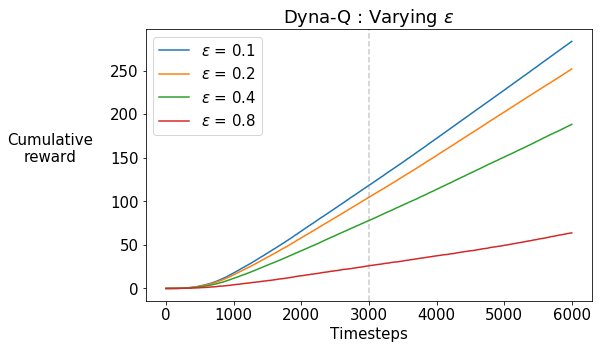
What do you observe?
Increasing the exploration via the $\epsilon$-greedy strategy does not seem to be helping. In fact, the agent’s cumulative reward decreases because it is spending more and more time trying out the exploratory actions.
Can we do better…?
Dyna-Q+
The motivation behind Dyna-Q+ is to give a bonus reward for actions that haven’t been tried for a long time, since there is a greater chance that the dynamics for that actions might have changed.
In particular, if the modeled reward for a transition is $r$, and the transition has not been tried in $\tau(s,a)$ time steps, then planning updates are done as if that transition produced a reward of $r + \kappa \sqrt{ \tau(s,a)}$, for some small $\kappa$.
Let’s implement that!
Based on your DynaQAgent, create a new class DynaQPlusAgent to implement the aforementioned exploration heuristic. Additionally :
- actions that had never been tried before from a state should now be allowed to be considered in the planning step,
- and the initial model for such actions is that they lead back to the same state with a reward of zero.
At this point, you might want to refer to the video lectures and Section 8.3 of the RL textbook for a refresher on Dyna-Q+.
As usual, let’s break this down in pieces and do it one-by-one.
First of all, check out the agent_init method below. In particular, pay attention to the attributes which are new to DynaQPlusAgent– state-visitation counts $\tau$ and the scaling parameter $\kappa$ – because you shall be using them later.
# Do not modify this cell!
class DynaQPlusAgent(BaseAgent):
def agent_init(self, agent_info):
"""Setup for the agent called when the experiment first starts.
Args:
agent_init_info (dict), the parameters used to initialize the agent. The dictionary contains:
{
num_states (int): The number of states,
num_actions (int): The number of actions,
epsilon (float): The parameter for epsilon-greedy exploration,
step_size (float): The step-size,
discount (float): The discount factor,
planning_steps (int): The number of planning steps per environmental interaction
kappa (float): The scaling factor for the reward bonus
random_seed (int): the seed for the RNG used in epsilon-greedy
planning_random_seed (int): the seed for the RNG used in the planner
}
"""
# First, we get the relevant information from agent_info
# Note: we use np.random.RandomState(seed) to set the two different RNGs
# for the planner and the rest of the code
try:
self.num_states = agent_info["num_states"]
self.num_actions = agent_info["num_actions"]
except:
print("You need to pass both 'num_states' and 'num_actions' \
in agent_info to initialize the action-value table")
self.gamma = agent_info.get("discount", 0.95)
self.step_size = agent_info.get("step_size", 0.1)
self.epsilon = agent_info.get("epsilon", 0.1)
self.planning_steps = agent_info.get("planning_steps", 10)
self.kappa = agent_info.get("kappa", 0.001)
self.rand_generator = np.random.RandomState(agent_info.get('random_seed', 42))
self.planning_rand_generator = np.random.RandomState(agent_info.get('planning_random_seed', 42))
# Next, we initialize the attributes required by the agent, e.g., q_values, model, tau, etc.
# The visitation-counts can be stored as a table as well, like the action values
self.q_values = np.zeros((self.num_states, self.num_actions))
self.tau = np.zeros((self.num_states, self.num_actions))
self.actions = list(range(self.num_actions))
self.past_action = -1
self.past_state = -1
self.model = {}
Now first up, implement the update_model method. Note that this is different from Dyna-Q in the aforementioned way.
%%add_to DynaQPlusAgent
# [GRADED]
def update_model(self, past_state, past_action, state, reward):
"""updates the model
Args:
past_state (int): s
past_action (int): a
state (int): s'
reward (int): r
Returns:
Nothing
"""
# Recall that when adding a state-action to the model, if the agent is visiting the state
# for the first time, then the remaining actions need to be added to the model as well
# with zero reward and a transition into itself. Something like:
## for action in self.actions:
## if action != past_action:
## self.model[past_state][action] = (past_state, 0)
#
# Note: do *not* update the visitation-counts here. We will do that in `agent_step`.
#
# (3 lines)
if past_state not in self.model:
self.model[past_state] = {past_action : (state, reward)}
### START CODE HERE ###
for action in self.actions:
if action != past_action:
self.model[past_state][action] = (past_state, 0)
### END CODE HERE ###
else:
self.model[past_state][past_action] = (state, reward)
Test update_model()
# Do not modify this cell!
## Test code for update_model() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQPlusAgent()
test_agent.agent_init(agent_info)
test_agent.update_model(0,2,0,1)
test_agent.update_model(2,0,1,1)
test_agent.update_model(0,3,1,2)
test_agent.tau[0][0] += 1
print("Model: \n", test_agent.model)
Model:
{0: {2: (0, 1), 0: (0, 0), 1: (0, 0), 3: (1, 2)}, 2: {0: (1, 1), 1: (2, 0), 2: (2, 0), 3: (2, 0)}}
Expected output:
Model:
{0: {2: (0, 1), 0: (0, 0), 1: (0, 0), 3: (1, 2)}, 2: {0: (1, 1), 1: (2, 0), 2: (2, 0), 3: (2, 0)}}
Note that the actions that were not taken from a state are also added to the model, with a loop back into the same state with a reward of 0.
Next, you will implement the planning_step() method. This will be very similar to the one you implemented in DynaQAgent, but here you will be adding the exploration bonus to the reward in the simulated transition.
%%add_to DynaQPlusAgent
# [GRADED]
def planning_step(self):
"""performs planning, i.e. indirect RL.
Args:
None
Returns:
Nothing
"""
# The indirect RL step:
# - Choose a state and action from the set of experiences that are stored in the model. (~2 lines)
# - Query the model with this state-action pair for the predicted next state and reward.(~1 line)
# - **Add the bonus to the reward** (~1 line)
# - Update the action values with this simulated experience. (2~4 lines)
# - Repeat for the required number of planning steps.
#
# Note that the update equation is different for terminal and non-terminal transitions.
# To differentiate between a terminal and a non-terminal next state, assume that the model stores
# the terminal state as a dummy state like -1
#
# Important: remember you have a random number generator 'planning_rand_generator' as
# a part of the class which you need to use as self.planning_rand_generator.choice()
# For the sake of reproducibility and grading, *do not* use anything else like
# np.random.choice() for performing search control.
### START CODE HERE ###
for i in range(self.planning_steps):
past_state = self.planning_rand_generator.choice(list(self.model.keys()))
past_action = self.planning_rand_generator.choice(list(self.model[past_state].keys()))
next_state, reward = self.model[past_state][past_action]
reward += self.kappa * np.sqrt(self.tau[past_state, past_action])
if next_state == -1:
q_max = 0
else:
q_max = np.max(self.q_values[next_state])
self.q_values[past_state, past_action] += self.step_size * (reward + self.gamma * q_max
- self.q_values[past_state, past_action])
### END CODE HERE ###
Test planning_step()
# Do not modify this cell!
## Test code for planning_step() ##
actions = []
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"kappa": 0.001,
"planning_steps": 4,
"random_seed": 0,
"planning_random_seed": 1}
test_agent = DynaQPlusAgent()
test_agent.agent_init(agent_info)
test_agent.update_model(0,1,-1,1)
test_agent.tau += 1; test_agent.tau[0][1] = 0
test_agent.update_model(0,2,1,1)
test_agent.tau += 1; test_agent.tau[0][2] = 0 # Note that these counts are manually updated
test_agent.update_model(2,0,1,1) # as we'll code them in `agent_step'
test_agent.tau += 1; test_agent.tau[2][0] = 0 # which hasn't been implemented yet.
test_agent.planning_step()
print("Model: \n", test_agent.model)
print("Action-value estimates: \n", test_agent.q_values)
Model:
{0: {1: (-1, 1), 0: (0, 0), 2: (1, 1), 3: (0, 0)}, 2: {0: (1, 1), 1: (2, 0), 2: (2, 0), 3: (2, 0)}}
Action-value estimates:
[[0. 0.10014142 0. 0. ]
[0. 0. 0. 0. ]
[0. 0.00036373 0. 0.00017321]]
Expected output:
Model:
{0: {1: (-1, 1), 0: (0, 0), 2: (1, 1), 3: (0, 0)}, 2: {0: (1, 1), 1: (2, 0), 2: (2, 0), 3: (2, 0)}}
Action-value estimates:
[[0. 0.10014142 0. 0. ]
[0. 0. 0. 0. ]
[0. 0.00036373 0. 0.00017321]]
Again, before you move on to implement the rest of the agent methods, here are the couple of helper functions that you’ve used in the previous assessments for choosing an action using an $\epsilon$-greedy policy.
%%add_to DynaQPlusAgent
# Do not modify this cell!
def argmax(self, q_values):
"""argmax with random tie-breaking
Args:
q_values (Numpy array): the array of action values
Returns:
action (int): an action with the highest value
"""
top = float("-inf")
ties = []
for i in range(len(q_values)):
if q_values[i] > top:
top = q_values[i]
ties = []
if q_values[i] == top:
ties.append(i)
return self.rand_generator.choice(ties)
def choose_action_egreedy(self, state):
"""returns an action using an epsilon-greedy policy w.r.t. the current action-value function.
Important: assume you have a random number generator 'rand_generator' as a part of the class
which you can use as self.rand_generator.choice() or self.rand_generator.rand()
Args:
state (List): coordinates of the agent (two elements)
Returns:
The action taken w.r.t. the aforementioned epsilon-greedy policy
"""
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.choice(self.actions)
else:
values = self.q_values[state]
action = self.argmax(values)
return action
Now implement the rest of the agent-related methods, namely agent_start, agent_step, and agent_end. Again, these will be very similar to the ones in the DynaQAgent, but you will have to think of a way to update the counts since the last visit.
%%add_to DynaQPlusAgent
# [GRADED]
def agent_start(self, state):
"""The first method called when the experiment starts, called after
the environment starts.
Args:
state (Numpy array): the state from the
environment's env_start function.
Returns:
(int) The first action the agent takes.
"""
# given the state, select the action using self.choose_action_egreedy(),
# and save current state and action (~2 lines)
### self.past_state = ?
### self.past_action = ?
# Note that the last-visit counts are not updated here.
### START CODE HERE ###
action = self.choose_action_egreedy(state)
self.past_state = state
self.past_action = action
### END CODE HERE ###
return self.past_action
def agent_step(self, reward, state):
"""A step taken by the agent.
Args:
reward (float): the reward received for taking the last action taken
state (Numpy array): the state from the
environment's step based on where the agent ended up after the
last step
Returns:
(int) The action the agent is taking.
"""
# Update the last-visited counts (~2 lines)
# - Direct-RL step (1~3 lines)
# - Model Update step (~1 line)
# - `planning_step` (~1 line)
# - Action Selection step (~1 line)
# Save the current state and action before returning the action to be performed. (~2 lines)
### START CODE HERE ###
# Tau Update step
self.tau += 1
self.tau[self.past_state, self.past_action] = 0
# Direct-RL step
q_max = np.max(self.q_values[state])
self.q_values[self.past_state, self.past_action] += self.step_size * (reward + self.gamma * q_max
- self.q_values[self.past_state, self.past_action])
# Model Update step
self.update_model(self.past_state, self.past_action, state, reward)
# Planning
self.planning_step()
# Choose Action
action = self.choose_action_egreedy(state)
# Save the current state and action
self.past_state = state
self.past_action = action
### END CODE HERE ###
return self.past_action
def agent_end(self, reward):
"""Called when the agent terminates.
Args:
reward (float): the reward the agent received for entering the
terminal state.
"""
# Again, add the same components you added in agent_step to augment Dyna-Q into Dyna-Q+
### START CODE HERE ###
# Tau Update step
self.tau += 1
self.tau[self.past_state, self.past_action] = 0
# Direct-RL step
self.q_values[self.past_state, self.past_action] += self.step_size * (reward
- self.q_values[self.past_state, self.past_action])
# Model Update step
self.update_model(self.past_state, self.past_action, -1, reward)
# Planning
self.planning_step()
### END CODE HERE ###
Let’s test these methods one-by-one.
Test agent_start()
# Do not modify this cell!
## Test code for agent_start() ##
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"kappa": 0.001,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQPlusAgent()
test_agent.agent_init(agent_info)
action = test_agent.agent_start(0) # state
print("Action:", action)
print("Timesteps since last visit: \n", test_agent.tau)
print("Action-value estimates: \n", test_agent.q_values)
print("Model: \n", test_agent.model)
Action: 1
Timesteps since last visit:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action-value estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Model:
{}
Expected output:
Action: 1
Timesteps since last visit:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action-value estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Model:
{}
Remember the last-visit counts are not updated in agent_start().
Test agent_step()
# Do not modify this cell!
## Test code for agent_step() ##
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"kappa": 0.001,
"planning_steps": 4,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQPlusAgent()
test_agent.agent_init(agent_info)
actions = []
actions.append(test_agent.agent_start(0)) # state
actions.append(test_agent.agent_step(1,2)) # (reward, state)
actions.append(test_agent.agent_step(0,1)) # (reward, state)
print("Actions:", actions)
print("Timesteps since last visit: \n", test_agent.tau)
print("Action-value estimates: \n", test_agent.q_values)
print("Model: \n", test_agent.model)
Actions: [1, 3, 1]
Timesteps since last visit:
[[2. 1. 2. 2.]
[2. 2. 2. 2.]
[2. 2. 2. 0.]]
Action-value estimates:
[[1.91000000e-02 2.71000000e-01 0.00000000e+00 1.91000000e-02]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[0.00000000e+00 1.83847763e-04 4.24264069e-04 0.00000000e+00]]
Model:
{0: {1: (2, 1), 0: (0, 0), 2: (0, 0), 3: (0, 0)}, 2: {3: (1, 0), 0: (2, 0), 1: (2, 0), 2: (2, 0)}}
Expected output:
Actions: [1, 3, 1]
Timesteps since last visit:
[[2. 1. 2. 2.]
[2. 2. 2. 2.]
[2. 2. 2. 0.]]
Action-value estimates:
[[1.91000000e-02 2.71000000e-01 0.00000000e+00 1.91000000e-02]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[0.00000000e+00 1.83847763e-04 4.24264069e-04 0.00000000e+00]]
Model:
{0: {1: (2, 1), 0: (0, 0), 2: (0, 0), 3: (0, 0)}, 2: {3: (1, 0), 0: (2, 0), 1: (2, 0), 2: (2, 0)}}
Test agent_end()
# Do not modify this cell!
## Test code for agent_end() ##
agent_info = {"num_actions": 4,
"num_states": 3,
"epsilon": 0.1,
"step_size": 0.1,
"discount": 1.0,
"kappa": 0.001,
"planning_steps": 4,
"random_seed": 0,
"planning_random_seed": 0}
test_agent = DynaQPlusAgent()
test_agent.agent_init(agent_info)
actions = []
actions.append(test_agent.agent_start(0))
actions.append(test_agent.agent_step(1,2))
actions.append(test_agent.agent_step(0,1))
test_agent.agent_end(1)
print("Actions:", actions)
print("Timesteps since last visit: \n", test_agent.tau)
print("Action-value estimates: \n", test_agent.q_values)
print("Model: \n", test_agent.model)
Actions: [1, 3, 1]
Timesteps since last visit:
[[3. 2. 3. 3.]
[3. 0. 3. 3.]
[3. 3. 3. 1.]]
Action-value estimates:
[[1.91000000e-02 3.44083848e-01 0.00000000e+00 4.44632051e-02]
[1.91732051e-02 1.90000000e-01 0.00000000e+00 0.00000000e+00]
[0.00000000e+00 1.83847763e-04 4.24264069e-04 0.00000000e+00]]
Model:
{0: {1: (2, 1), 0: (0, 0), 2: (0, 0), 3: (0, 0)}, 2: {3: (1, 0), 0: (2, 0), 1: (2, 0), 2: (2, 0)}, 1: {1: (-1, 1), 0: (1, 0), 2: (1, 0), 3: (1, 0)}}
Expected output:
Actions: [1, 3, 1]
Timesteps since last visit:
[[3. 2. 3. 3.]
[3. 0. 3. 3.]
[3. 3. 3. 1.]]
Action-value estimates:
[[1.91000000e-02 3.44083848e-01 0.00000000e+00 4.44632051e-02]
[1.91732051e-02 1.90000000e-01 0.00000000e+00 0.00000000e+00]
[0.00000000e+00 1.83847763e-04 4.24264069e-04 0.00000000e+00]]
Model:
{0: {1: (2, 1), 0: (0, 0), 2: (0, 0), 3: (0, 0)}, 2: {3: (1, 0), 0: (2, 0), 1: (2, 0), 2: (2, 0)}, 1: {1: (-1, 1), 0: (1, 0), 2: (1, 0), 3: (1, 0)}}
Experiment: Dyna-Q+ agent in the changing environment
Okay, now we’re ready to test our Dyna-Q+ agent on the Shortcut Maze. As usual, we will average the results over 30 independent runs of the experiment.
# Do NOT modify the parameter settings.
# Experiment parameters
experiment_parameters = {
"num_runs" : 30, # The number of times we run the experiment
"num_max_steps" : 6000, # The number of steps per experiment
}
# Environment parameters
environment_parameters = {
"discount": 0.95,
"change_at_n": 3000
}
# Agent parameters
agent_parameters = {
"num_states" : 54,
"num_actions" : 4,
"epsilon": 0.1,
"step_size" : 0.5,
"planning_steps" : [50]
}
current_env = ShortcutMazeEnvironment # The environment
current_agent = DynaQPlusAgent # The agent
run_experiment_with_state_visitations(current_env, current_agent, environment_parameters, agent_parameters, experiment_parameters, "Dyna-Q+")
shutil.make_archive('results', 'zip', 'results');
Planning steps : 50
100%|██████████| 30/30 [02:55<00:00, 5.86s/it]
Let’s compare the Dyna-Q and Dyna-Q+ agents with planning_steps=50 each.
# Do not modify this cell!
def plot_cumulative_reward_comparison(file_name_dynaq, file_name_dynaqplus):
cum_reward_q = np.load(file_name_dynaq).item()['cum_reward_all'][2]
cum_reward_qPlus = np.load(file_name_dynaqplus).item()['cum_reward_all'][0]
plt.plot(np.mean(cum_reward_qPlus, axis=0), label='Dyna-Q+')
plt.plot(np.mean(cum_reward_q, axis=0), label='Dyna-Q')
plt.axvline(x=3000, linestyle='--', color='grey', alpha=0.4)
plt.xlabel('Timesteps')
plt.ylabel('Cumulative\nreward', rotation=0, labelpad=60)
plt.legend(loc='upper left')
plt.title('Average performance of Dyna-Q and Dyna-Q+ agents in the Shortcut Maze\n')
plt.show()
# Do not modify this cell!
plot_cumulative_reward_comparison('results/Dyna-Q_shortcut_steps.npy', 'results/Dyna-Q+.npy')
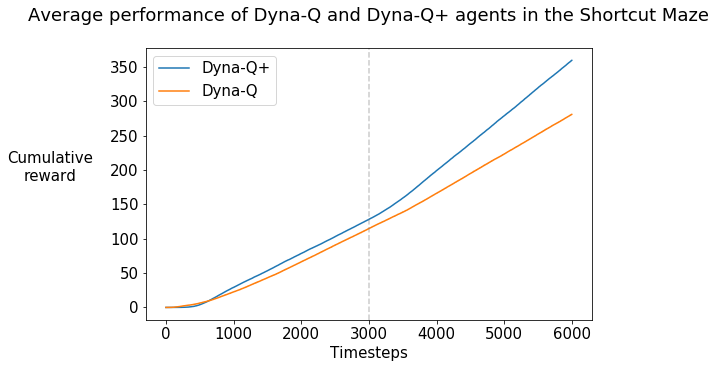
What do you observe? (For reference, your graph should look like Figure 8.5 in Chapter 8 of the RL textbook)
The slope of the curve increases for the Dyna-Q+ curve shortly after the shortcut opens up after 3000 steps, which indicates that the rate of receiving the positive reward increases. This implies that the Dyna-Q+ agent finds the shorter path to the goal.
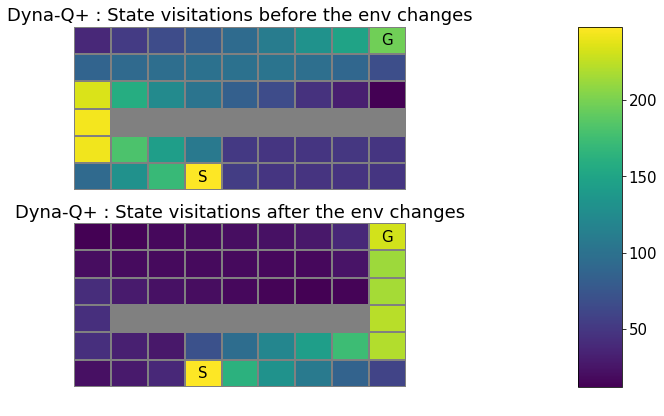
To verify this, let us plot the state-visitations of the Dyna-Q+ agent before and after the shortcut opens up.
# Do not modify this cell!
plot_state_visitations("results/Dyna-Q+.npy", ['Dyna-Q+ : State visitations before the env changes', 'Dyna-Q+ : State visitations after the env changes'], 0)
Q-Learning
In this section you will implement and test a Q-Learning agent with $\epsilon$-greedy action selection (Section 6.5 in the textbook).
Your job is to implement the updates in the methods agent_step and agent_end. We provide detailed comments in each method describing what your code should do.
# Q-Learning agent here
class QLearningAgent(agent.BaseAgent):
def agent_init(self, agent_init_info):
"""Setup for the agent called when the experiment first starts.
Args:
agent_init_info (dict), the parameters used to initialize the agent. The dictionary contains:
{
num_states (int): The number of states,
num_actions (int): The number of actions,
epsilon (float): The epsilon parameter for exploration,
step_size (float): The step-size,
discount (float): The discount factor,
}
"""
# Store the parameters provided in agent_init_info.
self.num_actions = agent_init_info["num_actions"]
self.num_states = agent_init_info["num_states"]
self.epsilon = agent_init_info["epsilon"]
self.step_size = agent_init_info["step_size"]
self.discount = agent_init_info["discount"]
self.rand_generator = np.random.RandomState(agent_info["seed"])
# Create an array for action-value estimates and initialize it to zero.
self.q = np.zeros((self.num_states, self.num_actions)) # The array of action-value estimates.
def agent_start(self, state):
"""The first method called when the episode starts, called after
the environment starts.
Args:
state (int): the state from the
environment's evn_start function.
Returns:
action (int): the first action the agent takes.
"""
# Choose action using epsilon greedy.
current_q = self.q[state,:]
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.randint(self.num_actions)
else:
action = self.argmax(current_q)
self.prev_state = state
self.prev_action = action
return action
def agent_step(self, reward, state):
"""A step taken by the agent.
Args:
reward (float): the reward received for taking the last action taken
state (int): the state from the
environment's step based on where the agent ended up after the
last step.
Returns:
action (int): the action the agent is taking.
"""
# Choose action using epsilon greedy.
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.randint(self.num_actions)
else:
action = self.argmax(self.q[state, :])
# Perform an update (1 line)
### START CODE HERE ###
self.q[self.prev_state, self.prev_action] += self.step_size * (reward + self.discount * np.max(self.q[state, :]) \
- self.q[self.prev_state, self.prev_action])
### END CODE HERE ###
self.prev_state = state
self.prev_action = action
return action
def agent_end(self, reward):
"""Run when the agent terminates.
Args:
reward (float): the reward the agent received for entering the
terminal state.
"""
# Perform the last update in the episode (1 line)
### START CODE HERE ###
self.q[self.prev_state, self.prev_action] += self.step_size * (reward- self.q[self.prev_state, self.prev_action])
### END CODE HERE ###
def argmax(self, q_values):
"""argmax with random tie-breaking
Args:
q_values (Numpy array): the array of action-values
Returns:
action (int): an action with the highest value
"""
top = float("-inf")
ties = []
for i in range(len(q_values)):
if q_values[i] > top:
top = q_values[i]
ties = []
if q_values[i] == top:
ties.append(i)
return self.rand_generator.choice(ties)
Test
Run the cells below to test the implemented methods. The output of each cell should match the expected output.
Note that passing this test does not guarantee correct behavior on the Cliff World.
# Do not modify this cell!
## Test Code for agent_start() ##
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = QLearningAgent()
current_agent.agent_init(agent_info)
action = current_agent.agent_start(0)
print("Action Value Estimates: \n", current_agent.q)
print("Action:", action)
Action Value Estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action: 1
Expected Output:
Action Value Estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action: 1
# Do not modify this cell!
## Test Code for agent_step() ##
actions = []
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = QLearningAgent()
current_agent.agent_init(agent_info)
actions.append(current_agent.agent_start(0))
actions.append(current_agent.agent_step(2, 1))
actions.append(current_agent.agent_step(0, 0))
print("Action Value Estimates: \n", current_agent.q)
print("Actions:", actions)
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.02]
[0. 0. 0. 0. ]]
Actions: [1, 3, 1]
Expected Output:
Action Value Estimates:
[[ 0. 0.2 0. 0. ]
[ 0. 0. 0. 0.02]
[ 0. 0. 0. 0. ]]
Actions: [1, 3, 1]
# Do not modify this cell!
## Test Code for agent_end() ##
actions = []
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = QLearningAgent()
current_agent.agent_init(agent_info)
actions.append(current_agent.agent_start(0))
actions.append(current_agent.agent_step(2, 1))
current_agent.agent_end(1)
print("Action Value Estimates: \n", current_agent.q)
print("Actions:", actions)
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.1]
[0. 0. 0. 0. ]]
Actions: [1, 3]
Expected Output:
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.1]
[0. 0. 0. 0. ]]
Actions: [1, 3]
Expected Sarsa
In this section you will implement an Expected Sarsa agent with $\epsilon$-greedy action selection (Section 6.6 in the textbook).
Your job is to implement the updates in the methods agent_step and agent_end. We provide detailed comments in each method describing what your code should do.
class ExpectedSarsaAgent(agent.BaseAgent):
def agent_init(self, agent_init_info):
"""Setup for the agent called when the experiment first starts.
Args:
agent_init_info (dict), the parameters used to initialize the agent. The dictionary contains:
{
num_states (int): The number of states,
num_actions (int): The number of actions,
epsilon (float): The epsilon parameter for exploration,
step_size (float): The step-size,
discount (float): The discount factor,
}
"""
# Store the parameters provided in agent_init_info.
self.num_actions = agent_init_info["num_actions"]
self.num_states = agent_init_info["num_states"]
self.epsilon = agent_init_info["epsilon"]
self.step_size = agent_init_info["step_size"]
self.discount = agent_init_info["discount"]
self.rand_generator = np.random.RandomState(agent_info["seed"])
# Create an array for action-value estimates and initialize it to zero.
self.q = np.zeros((self.num_states, self.num_actions)) # The array of action-value estimates.
def agent_start(self, state):
"""The first method called when the episode starts, called after
the environment starts.
Args:
state (int): the state from the
environment's evn_start function.
Returns:
action (int): the first action the agent takes.
"""
# Choose action using epsilon greedy.
current_q = self.q[state, :]
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.randint(self.num_actions)
else:
action = self.argmax(current_q)
self.prev_state = state
self.prev_action = action
return action
def agent_step(self, reward, state):
"""A step taken by the agent.
Args:
reward (float): the reward received for taking the last action taken
state (int): the state from the
environment's step based on where the agent ended up after the
last step.
Returns:
action (int): the action the agent is taking.
"""
# Choose action using epsilon greedy.
if self.rand_generator.rand() < self.epsilon:
action = self.rand_generator.randint(self.num_actions)
else:
action = self.argmax(self.q[state,:])
# Perform an update (~5 lines)
### START CODE HERE ###
expected_q = 0
q_max = np.max(self.q[state,:])
pi = np.ones(self.num_actions) * self.epsilon / self.num_actions \
+ (self.q[state,:] == q_max) * (1 - self.epsilon) / np.sum(self.q[state,:] == q_max)
expected_q = np.sum(self.q[state,:] * pi)
self.q[self.prev_state, self.prev_action] += self.step_size * (reward + self.discount * expected_q \
- self.q[self.prev_state, self.prev_action])
### END CODE HERE ###
self.prev_state = state
self.prev_action = action
return action
def agent_end(self, reward):
"""Run when the agent terminates.
Args:
reward (float): the reward the agent received for entering the
terminal state.
"""
# Perform the last update in the episode (1 line)
### START CODE HERE ###
self.q[self.prev_state, self.prev_action] += self.step_size * (reward- self.q[self.prev_state, self.prev_action])
### END CODE HERE ###
def argmax(self, q_values):
"""argmax with random tie-breaking
Args:
q_values (Numpy array): the array of action-values
Returns:
action (int): an action with the highest value
"""
top = float("-inf")
ties = []
for i in range(len(q_values)):
if q_values[i] > top:
top = q_values[i]
ties = []
if q_values[i] == top:
ties.append(i)
return self.rand_generator.choice(ties)
test
Run the cells below to test the implemented methods. The output of each cell should match the expected output.
Note that passing this test does not guarantee correct behavior on the Cliff World.
# Do not modify this cell!
## Test Code for agent_start() ##
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = ExpectedSarsaAgent()
current_agent.agent_init(agent_info)
action = current_agent.agent_start(0)
print("Action Value Estimates: \n", current_agent.q)
print("Action:", action)
Action Value Estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action: 1
Expected Output:
Action Value Estimates:
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
Action: 1
# Do not modify this cell!
## Test Code for agent_step() ##
actions = []
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = ExpectedSarsaAgent()
current_agent.agent_init(agent_info)
actions.append(current_agent.agent_start(0))
actions.append(current_agent.agent_step(2, 1))
actions.append(current_agent.agent_step(0, 0))
print("Action Value Estimates: \n", current_agent.q)
print("Actions:", actions)
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.0185]
[0. 0. 0. 0. ]]
Actions: [1, 3, 1]
Expected Output:
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.0185]
[0. 0. 0. 0. ]]
Actions: [1, 3, 1]
# Do not modify this cell!
## Test Code for agent_end() ##
actions = []
agent_info = {"num_actions": 4, "num_states": 3, "epsilon": 0.1, "step_size": 0.1, "discount": 1.0, "seed": 0}
current_agent = ExpectedSarsaAgent()
current_agent.agent_init(agent_info)
actions.append(current_agent.agent_start(0))
actions.append(current_agent.agent_step(2, 1))
current_agent.agent_end(1)
print("Action Value Estimates: \n", current_agent.q)
print("Actions:", actions)
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.1]
[0. 0. 0. 0. ]]
Actions: [1, 3]
Expected Output:
Action Value Estimates:
[[0. 0.2 0. 0. ]
[0. 0. 0. 0.1]
[0. 0. 0. 0. ]]
Actions: [1, 3]
Solving the Cliff World
We described the Cliff World environment in the video “Expected Sarsa in the Cliff World” in Lesson 3. This is an undiscounted episodic task and thus we set $\gamma$=1. The agent starts in the bottom left corner of the gridworld below and takes actions that move it in the four directions. Actions that would move the agent off of the cliff incur a reward of -100 and send the agent back to the start state. The reward for all other transitions is -1. An episode terminates when the agent reaches the bottom right corner.

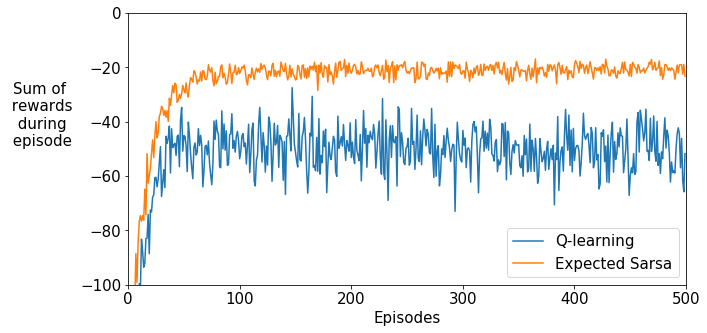
Using the experiment program in the cell below we now compare the agents on the Cliff World environment and plot the sum of rewards during each episode for the two agents.
The result of this cell will be graded. If you make any changes to your algorithms, you have to run this cell again before submitting the assignment.
# Do not modify this cell!
agents = {
"Q-learning": QLearningAgent,
"Expected Sarsa": ExpectedSarsaAgent
}
env = cliffworld_env.Environment
all_reward_sums = {} # Contains sum of rewards during episode
all_state_visits = {} # Contains state visit counts during the last 10 episodes
agent_info = {"num_actions": 4, "num_states": 48, "epsilon": 0.1, "step_size": 0.5, "discount": 1.0}
env_info = {}
num_runs = 100 # The number of runs
num_episodes = 500 # The number of episodes in each run
for algorithm in ["Q-learning", "Expected Sarsa"]:
all_reward_sums[algorithm] = []
all_state_visits[algorithm] = []
for run in tqdm(range(num_runs)):
agent_info["seed"] = run
rl_glue = RLGlue(env, agents[algorithm])
rl_glue.rl_init(agent_info, env_info)
reward_sums = []
state_visits = np.zeros(48)
# last_episode_total_reward = 0
for episode in range(num_episodes):
if episode < num_episodes - 10:
# Runs an episode
rl_glue.rl_episode(0)
else:
# Runs an episode while keeping track of visited states
state, action = rl_glue.rl_start()
state_visits[state] += 1
is_terminal = False
while not is_terminal:
reward, state, action, is_terminal = rl_glue.rl_step()
state_visits[state] += 1
reward_sums.append(rl_glue.rl_return())
# last_episode_total_reward = rl_glue.rl_return()
all_reward_sums[algorithm].append(reward_sums)
all_state_visits[algorithm].append(state_visits)
# save results
import os
import shutil
os.makedirs('results', exist_ok=True)
np.save('results/q_learning.npy', all_reward_sums['Q-learning'])
np.save('results/expected_sarsa.npy', all_reward_sums['Expected Sarsa'])
shutil.make_archive('results', 'zip', '.', 'results')
for algorithm in ["Q-learning", "Expected Sarsa"]:
plt.plot(np.mean(all_reward_sums[algorithm], axis=0), label=algorithm)
plt.xlabel("Episodes")
plt.ylabel("Sum of\n rewards\n during\n episode",rotation=0, labelpad=40)
plt.xlim(0,500)
plt.ylim(-100,0)
plt.legend()
plt.show()
100%|██████████| 100/100 [00:22<00:00, 4.37it/s]
100%|██████████| 100/100 [00:52<00:00, 1.89it/s]
To see why these two agents behave differently, let’s inspect the states they visit most. Run the cell below to generate plots showing the number of timesteps that the agents spent in each state over the last 10 episodes.
# Do not modify this cell!
for algorithm, position in [("Q-learning", 211), ("Expected Sarsa", 212)]:
plt.subplot(position)
average_state_visits = np.array(all_state_visits[algorithm]).mean(axis=0)
grid_state_visits = average_state_visits.reshape((4,12))
grid_state_visits[0,1:-1] = np.nan
plt.pcolormesh(grid_state_visits, edgecolors='gray', linewidth=2)
plt.title(algorithm)
plt.axis('off')
cm = plt.get_cmap()
cm.set_bad('gray')
plt.subplots_adjust(bottom=0.0, right=0.7, top=1.0)
cax = plt.axes([0.85, 0.0, 0.075, 1.])
cbar = plt.colorbar(cax=cax)
cbar.ax.set_ylabel("Visits during\n the last 10\n episodes", rotation=0, labelpad=70)
plt.show()
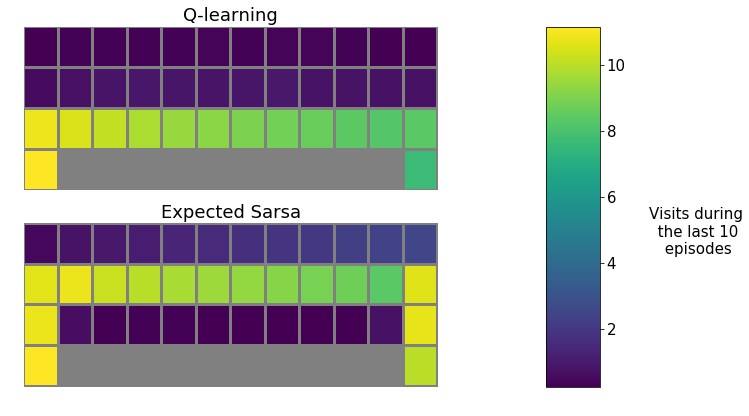
The Q-learning agent learns the optimal policy, one that moves along the cliff and reaches the goal in as few steps as possible. However, since the agent does not follow the optimal policy and uses $\epsilon$-greedy exploration, it occasionally falls off the cliff. The Expected Sarsa agent takes exploration into account and follows a safer path. Note this is different from the book. The book shows Sarsa learns the even safer path
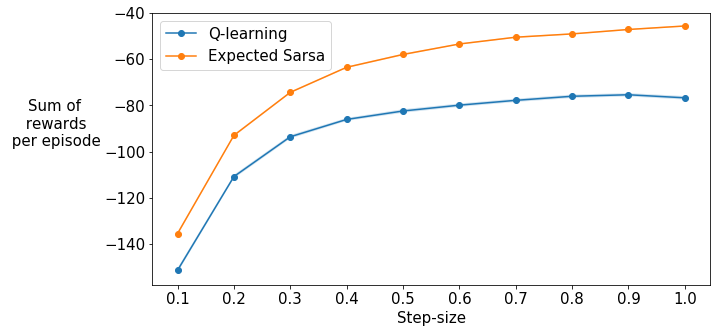
Previously we used a fixed step-size of 0.5 for the agents. What happens with other step-sizes? Does this difference in performance persist?
In the next experiment we will try 10 different step-sizes from 0.1 to 1.0 and compare the sum of rewards per episode averaged over the first 100 episodes (similar to the interim performance curves in Figure 6.3 of the textbook). Shaded regions show standard errors.
This cell takes around 10 minutes to run. The result of this cell will be graded. If you make any changes to your algorithms, you have to run this cell again before submitting the assignment.
# Do not modify this cell!
agents = {
"Q-learning": QLearningAgent,
"Expected Sarsa": ExpectedSarsaAgent
}
env = cliffworld_env.Environment
all_reward_sums = {}
step_sizes = np.linspace(0.1,1.0,10)
agent_info = {"num_actions": 4, "num_states": 48, "epsilon": 0.1, "discount": 1.0}
env_info = {}
num_runs = 100
num_episodes = 100
all_reward_sums = {}
for algorithm in ["Q-learning", "Expected Sarsa"]:
for step_size in step_sizes:
all_reward_sums[(algorithm, step_size)] = []
agent_info["step_size"] = step_size
for run in tqdm(range(num_runs)):
agent_info["seed"] = run
rl_glue = RLGlue(env, agents[algorithm])
rl_glue.rl_init(agent_info, env_info)
return_sum = 0
for episode in range(num_episodes):
rl_glue.rl_episode(0)
return_sum += rl_glue.rl_return()
all_reward_sums[(algorithm, step_size)].append(return_sum/num_episodes)
for algorithm in ["Q-learning", "Expected Sarsa"]:
algorithm_means = np.array([np.mean(all_reward_sums[(algorithm, step_size)]) for step_size in step_sizes])
algorithm_stds = np.array([sem(all_reward_sums[(algorithm, step_size)]) for step_size in step_sizes])
plt.plot(step_sizes, algorithm_means, marker='o', linestyle='solid', label=algorithm)
plt.fill_between(step_sizes, algorithm_means + algorithm_stds, algorithm_means - algorithm_stds, alpha=0.2)
plt.legend()
plt.xlabel("Step-size")
plt.ylabel("Sum of\n rewards\n per episode",rotation=0, labelpad=50)
plt.xticks(step_sizes)
plt.show()
100%|██████████| 100/100 [00:20<00:00, 4.96it/s]
100%|██████████| 100/100 [00:14<00:00, 6.92it/s]
100%|██████████| 100/100 [00:10<00:00, 9.45it/s]
100%|██████████| 100/100 [00:09<00:00, 10.74it/s]
100%|██████████| 100/100 [00:08<00:00, 12.01it/s]
100%|██████████| 100/100 [00:08<00:00, 12.36it/s]
100%|██████████| 100/100 [00:07<00:00, 12.82it/s]
100%|██████████| 100/100 [00:07<00:00, 13.48it/s]
100%|██████████| 100/100 [00:07<00:00, 13.55it/s]
100%|██████████| 100/100 [00:07<00:00, 14.06it/s]
100%|██████████| 100/100 [00:43<00:00, 2.27it/s]
100%|██████████| 100/100 [00:31<00:00, 3.17it/s]
100%|██████████| 100/100 [00:25<00:00, 3.93it/s]
100%|██████████| 100/100 [00:21<00:00, 4.55it/s]
100%|██████████| 100/100 [00:19<00:00, 5.12it/s]
100%|██████████| 100/100 [00:18<00:00, 5.48it/s]
100%|██████████| 100/100 [00:17<00:00, 5.86it/s]
100%|██████████| 100/100 [00:16<00:00, 5.96it/s]
100%|██████████| 100/100 [00:15<00:00, 6.30it/s]
100%|██████████| 100/100 [00:15<00:00, 6.38it/s]