- Develop Environment
- NuScenes DATASET
- COORDINATE TRANSFORM FOR INFERENCED DATA
- 3D visualization of the point cloud data(pcd)
- Nuscenes Dataset Tutorials
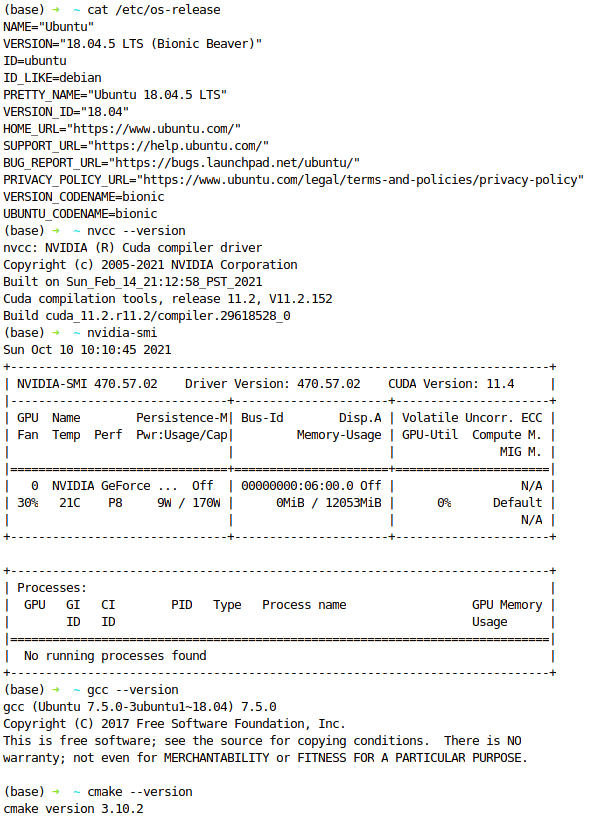
Develop Environment
Compare to radar and image processing, lidar point cloud processing has a lot more compuational accelerateions that is coded with c++. Compilation with c/c++ is not pleasant yet a necessary step for lidar based perception.
While there are lot cuda code for 3d inforamtion processing in the public domain, very few of them are actively maintained. MMlab is one exception and that is what we decided to use for this and future projects. You can learn more about mmlab here.
User Docker Image
It is easier for future users to just pull the docker image which has been complied. Specific instructions are the following:
install docker
install nvidia container runtime
install nvidia container runtime which will allow docker to interface with your local gpu. Detailed instructions can be find here
distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update
sudo apt-get install -y nvidia-docker2
Set nvidia-container-runtime as default docker runtime by edit the /etc/docker/daemon.json file:
{
"runtimes": {
"nvidia": {
"path": "/usr/bin/nvidia-container-runtime",
"runtimeArgs": []
}
},
"default-runtime": "nvidia"
}
restart docker sudo systemctl restart docker
get the docker image
pull image from docker hub with docker pull bailiping/mmlab:v3.0 or build it locally with the docker file provided.
the base image for the docker file is spconv compilation environment. You will have to set nvidia container runtime as default for
the building process as well.
run container
to run the docker image with command:
sudo docker run --gpus all -it -v '/home/zhubinglab/Desktop/NuScenes_Project':/root/NuScenes_Project --name mmlab bailiping/mmlab:v3.0 bash
--gpus allmeans expose all gpus to docker-itmeans interactive-vmeans mount a volumn
verify container
use test_inference.sh to check if this environment works in your local machine
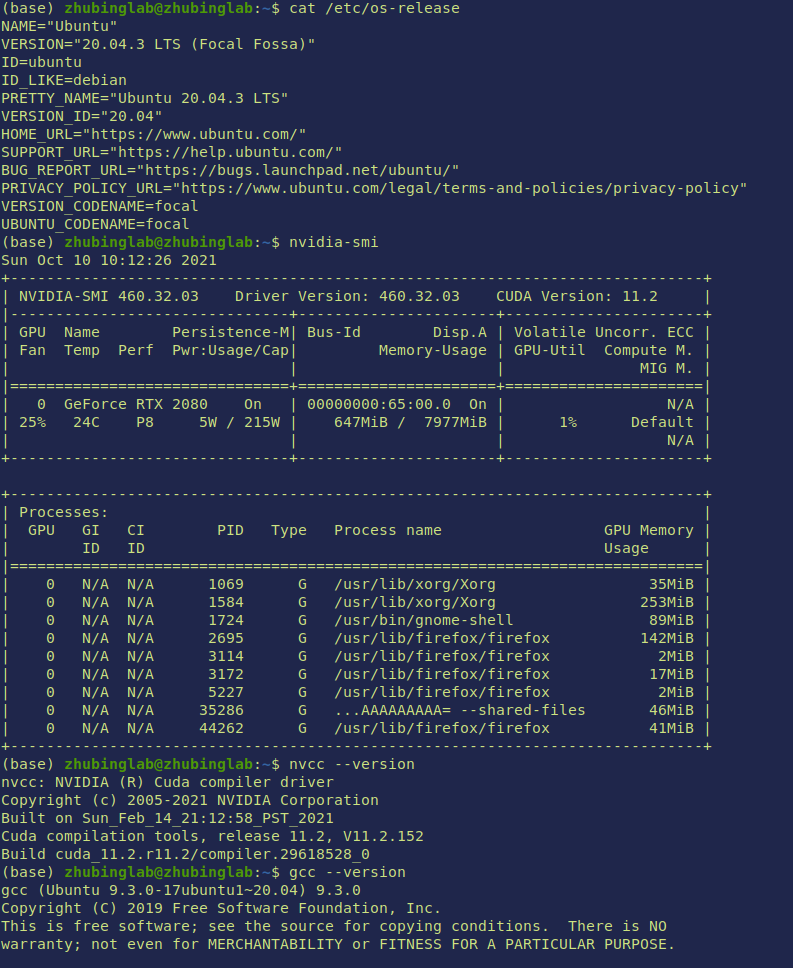
Setup your own machine
If you prefer to compile things for your own machine, here is how we set up ours for your reference. A key take away is that don’t try to manually uninstall nvidia related stuff. Coz most likely there would be broken links/package left and would make things tidious. Do it once, restart your computer right away to make sure the driver is working properly before you proceed.

Alternatively, here is another setup that can work
You will have to download pretrained models in order for the code to work. The following is an sample script for how to set things up. we use this centerpoint model for our inference, yet you can download any other pretrained models. For detailed discription, please read mmlab documentation
mkdir checkpoint
cd checkpoint
wget https://download.openmmlab.com/mmdetection3d/v0.1.0_models/centerpoint/centerpoint_01voxel_second_secfpn_circlenms_4x8_cyclic_20e_nus/centerpoint_01voxel_second_secfpn_circlenms_4x8_cyclic_20e_nus_20201001_135205-5db91e00.pth
NuScenes DATASET
Dataset Schema
visualization for the annotation (ground truth)
Sample Data
sample_data { "token": <str> -- Unique record identifier. "sample_token": <str> -- Foreign key. Sample to which this sample_data is associated. "ego_pose_token": <str> -- Foreign key. "calibrated_sensor_token": <str> -- Foreign key. "filename": <str> -- Relative path to data-blob on disk. "fileformat": <str> -- Data file format. "width": <int> -- If the sample data is an image, this is the image width in pixels. "height": <int> -- If the sample data is an image, this is the image height in pixels. "timestamp": <int> -- Unix time stamp. "is_key_frame": <bool> -- True if sample_data is part of key_frame, else False. "next": <str> -- Foreign key. Sample data from the same sensor that follows this in time. Empty if end of scene. "prev": <str> -- Foreign key. Sample data from the same sensor that precedes this in time. Empty if start of scene. }Sample Annotation
A bounding box defining the position of an object seen in a sample. All location data is given with respect to the
GLOBAL coordinate system. ``` sample_annotation { “token”:-- Unique record identifier. "sample_token": -- Foreign key. NOTE: this points to a sample NOT a sample_data since annotations are done on the sample level taking all relevant sample_data into account. "instance_token": -- Foreign key. Which object instance is this annotating. An instance can have multiple annotations over time. "attribute_tokens": [n] -- Foreign keys. List of attributes for this annotation. Attributes can change over time, so they belong here, not in the instance table. "visibility_token": -- Foreign key. Visibility may also change over time. If no visibility is annotated, the token is an empty string. "translation": [3] -- Bounding box location in meters as center_x, center_y, center_z. "size": [3] -- Bounding box size in meters as width, length, height. "rotation": [4] -- Bounding box orientation as quaternion: w, x, y, z. "num_lidar_pts": -- Number of lidar points in this box. Points are counted during the lidar sweep identified with this sample. "num_radar_pts": -- Number of radar points in this box. Points are counted during the radar sweep identified with this sample. This number is summed across all radar sensors without any invalid point filtering. "next": -- Foreign key. Sample annotation from the same object instance that follows this in time. Empty if this is the last annotation for this object. "prev": -- Foreign key. Sample annotation from the same object instance that precedes this in time. Empty if this is the first annotation for this object. }
## Keyframe and Sweeps
the `keyframe` is a `2Hz`
After collecting the driving data, we sample well synchronized keyframes (image, LIDAR, RADAR) at 2Hz and send them to our annotation partner Scale for annotation.
the `lidar sweep` is at `20Hz`, image is at `12Hz`, radar is at `15Hz`
In order to achieve good cross-modality data alignment between the LIDAR and the cameras, the exposure of a camera is triggered when the top LIDAR sweeps across the center of the camera’s FOV. The timestamp of the image is the exposure trigger time; and the timestamp of the LIDAR scan is the time when the full rotation of the current LIDAR frame is achieved. Given that the camera’s exposure time is nearly instantaneous, this method generally yields good data alignment. Note that the cameras run at 12Hz while the LIDAR runs at 20Hz. The 12 camera exposures are spread as evenly as possible across the 20 LIDAR scans, so not all LIDAR scans have a corresponding camera frame. Reducing the frame rate of the cameras to 12Hz helps to reduce the compute, bandwidth and storage requirement of the perception system.
# Inference Output
## File Name

- The last 16 digits are the `timestamp` for the frame.
- use the `timestamp` in order to find out which frame it is in a scene.
## Bounding Boxes
the inference bbox information is giben in `LIDAR coordinate system`. Therefore need to be projected to the `GLOBAL coordinate system`.

```python
class LiDARInstance3DBoxes(BaseInstance3DBoxes):
"""3D boxes of instances in LIDAR coordinates.
Coordinates in LiDAR:
.. code-block:: none
up z x front (yaw=-0.5*pi)
^ ^
| /
| /
(yaw=-pi) left y <------ 0 -------- (yaw=0)
The relative coordinate of bottom center in a LiDAR box is (0.5, 0.5, 0),
and the yaw is around the z axis, thus the rotation axis=2.
The yaw is 0 at the negative direction of y axis, and decreases from
the negative direction of y to the positive direction of x.
A refactor is ongoing to make the three coordinate systems
easier to understand and convert between each other.
Attributes:
tensor (torch.Tensor): Float matrix of N x box_dim.
box_dim (int): Integer indicating the dimension of a box.
Each row is (x, y, z, x_size, y_size, z_size, yaw, ...).
with_yaw (bool): If True, the value of yaw will be set to 0 as minmax
boxes.
"""
@property
def gravity_center(self):
"""torch.Tensor: A tensor with center of each box."""
bottom_center = self.bottom_center
gravity_center = torch.zeros_like(bottom_center)
gravity_center[:, :2] = bottom_center[:, :2]
gravity_center[:, 2] = bottom_center[:, 2] + self.tensor[:, 5] * 0.5
return gravity_center
@property
def corners(self):
"""torch.Tensor: Coordinates of corners of all the boxes
in shape (N, 8, 3).
Convert the boxes to corners in clockwise order, in form of
``(x0y0z0, x0y0z1, x0y1z1, x0y1z0, x1y0z0, x1y0z1, x1y1z1, x1y1z0)``
.. code-block:: none
up z
front x ^
/ |
/ |
(x1, y0, z1) + ----------- + (x1, y1, z1)
/| / |
/ | / |
(x0, y0, z1) + ----------- + + (x1, y1, z0)
| / . | /
| / origin | /
left y<-------- + ----------- + (x0, y1, z0)
(x0, y0, z0)
"""
# TODO: rotation_3d_in_axis function do not support
# empty tensor currently.
assert len(self.tensor) != 0
dims = self.dims
corners_norm = torch.from_numpy(
np.stack(np.unravel_index(np.arange(8), [2] * 3), axis=1)).to(
device=dims.device, dtype=dims.dtype)
corners_norm = corners_norm[[0, 1, 3, 2, 4, 5, 7, 6]]
# use relative origin [0.5, 0.5, 0]
corners_norm = corners_norm - dims.new_tensor([0.5, 0.5, 0])
corners = dims.view([-1, 1, 3]) * corners_norm.reshape([1, 8, 3])
# rotate around z axis
corners = rotation_3d_in_axis(corners, self.tensor[:, 6], axis=2)
corners += self.tensor[:, :3].view(-1, 1, 3)
return corners
@property
def bev(self):
"""torch.Tensor: 2D BEV box of each box with rotation
in XYWHR format."""
return self.tensor[:, [0, 1, 3, 4, 6]]
@property
def nearest_bev(self):
"""torch.Tensor: A tensor of 2D BEV box of each box
without rotation."""
# Obtain BEV boxes with rotation in XYWHR format
bev_rotated_boxes = self.bev
# convert the rotation to a valid range
rotations = bev_rotated_boxes[:, -1]
normed_rotations = torch.abs(limit_period(rotations, 0.5, np.pi))
# find the center of boxes
conditions = (normed_rotations > np.pi / 4)[..., None]
bboxes_xywh = torch.where(conditions, bev_rotated_boxes[:,
[0, 1, 3, 2]],
bev_rotated_boxes[:, :4])
centers = bboxes_xywh[:, :2]
dims = bboxes_xywh[:, 2:]
bev_boxes = torch.cat([centers - dims / 2, centers + dims / 2], dim=-1)
return bev_boxes
def rotate(self, angle, points=None):
"""Rotate boxes with points (optional) with the given angle or \
rotation matrix.
Args:
angles (float | torch.Tensor | np.ndarray):
Rotation angle or rotation matrix.
points (torch.Tensor, numpy.ndarray, :obj:`BasePoints`, optional):
Points to rotate. Defaults to None.
Returns:
tuple or None: When ``points`` is None, the function returns \
None, otherwise it returns the rotated points and the \
rotation matrix ``rot_mat_T``.
"""
if not isinstance(angle, torch.Tensor):
angle = self.tensor.new_tensor(angle)
assert angle.shape == torch.Size([3, 3]) or angle.numel() == 1, \
f'invalid rotation angle shape {angle.shape}'
if angle.numel() == 1:
rot_sin = torch.sin(angle)
rot_cos = torch.cos(angle)
rot_mat_T = self.tensor.new_tensor([[rot_cos, -rot_sin, 0],
[rot_sin, rot_cos, 0],
[0, 0, 1]])
else:
rot_mat_T = angle
rot_sin = rot_mat_T[1, 0]
rot_cos = rot_mat_T[0, 0]
angle = np.arctan2(rot_sin, rot_cos)
self.tensor[:, :3] = self.tensor[:, :3] @ rot_mat_T
self.tensor[:, 6] += angle
if self.tensor.shape[1] == 9:
# rotate velo vector
self.tensor[:, 7:9] = self.tensor[:, 7:9] @ rot_mat_T[:2, :2]
if points is not None:
if isinstance(points, torch.Tensor):
points[:, :3] = points[:, :3] @ rot_mat_T
elif isinstance(points, np.ndarray):
rot_mat_T = rot_mat_T.numpy()
points[:, :3] = np.dot(points[:, :3], rot_mat_T)
elif isinstance(points, BasePoints):
# clockwise
points.rotate(-angle)
else:
raise ValueError
return points, rot_mat_T
def flip(self, bev_direction='horizontal', points=None):
"""Flip the boxes in BEV along given BEV direction.
In LIDAR coordinates, it flips the y (horizontal) or x (vertical) axis.
Args:
bev_direction (str): Flip direction (horizontal or vertical).
points (torch.Tensor, numpy.ndarray, :obj:`BasePoints`, None):
Points to flip. Defaults to None.
Returns:
torch.Tensor, numpy.ndarray or None: Flipped points.
"""
assert bev_direction in ('horizontal', 'vertical')
if bev_direction == 'horizontal':
self.tensor[:, 1::7] = -self.tensor[:, 1::7]
if self.with_yaw:
self.tensor[:, 6] = -self.tensor[:, 6] + np.pi
elif bev_direction == 'vertical':
self.tensor[:, 0::7] = -self.tensor[:, 0::7]
if self.with_yaw:
self.tensor[:, 6] = -self.tensor[:, 6]
if points is not None:
assert isinstance(points, (torch.Tensor, np.ndarray, BasePoints))
if isinstance(points, (torch.Tensor, np.ndarray)):
if bev_direction == 'horizontal':
points[:, 1] = -points[:, 1]
elif bev_direction == 'vertical':
points[:, 0] = -points[:, 0]
elif isinstance(points, BasePoints):
points.flip(bev_direction)
return points
def in_range_bev(self, box_range):
"""Check whether the boxes are in the given range.
Args:
box_range (list | torch.Tensor): the range of box
(x_min, y_min, x_max, y_max)
Note:
The original implementation of SECOND checks whether boxes in
a range by checking whether the points are in a convex
polygon, we reduce the burden for simpler cases.
Returns:
torch.Tensor: Whether each box is inside the reference range.
"""
in_range_flags = ((self.tensor[:, 0] > box_range[0])
& (self.tensor[:, 1] > box_range[1])
& (self.tensor[:, 0] < box_range[2])
& (self.tensor[:, 1] < box_range[3]))
return in_range_flags
def convert_to(self, dst, rt_mat=None):
"""Convert self to ``dst`` mode.
Args:
dst (:obj:`Box3DMode`): the target Box mode
rt_mat (np.ndarray | torch.Tensor): The rotation and translation
matrix between different coordinates. Defaults to None.
The conversion from ``src`` coordinates to ``dst`` coordinates
usually comes along the change of sensors, e.g., from camera
to LiDAR. This requires a transformation matrix.
Returns:
:obj:`BaseInstance3DBoxes`: \
The converted box of the same type in the ``dst`` mode.
"""
from .box_3d_mode import Box3DMode
return Box3DMode.convert(
box=self, src=Box3DMode.LIDAR, dst=dst, rt_mat=rt_mat)
def enlarged_box(self, extra_width):
"""Enlarge the length, width and height boxes.
Args:
extra_width (float | torch.Tensor): Extra width to enlarge the box.
Returns:
:obj:`LiDARInstance3DBoxes`: Enlarged boxes.
"""
enlarged_boxes = self.tensor.clone()
enlarged_boxes[:, 3:6] += extra_width * 2
# bottom center z minus extra_width
enlarged_boxes[:, 2] -= extra_width
return self.new_box(enlarged_boxes)
def points_in_boxes(self, points):
"""Find the box which the points are in.
Args:
points (torch.Tensor): Points in shape (N, 3).
Returns:
torch.Tensor: The index of box where each point are in.
"""
box_idx = points_in_boxes_gpu(
points.unsqueeze(0),
self.tensor.unsqueeze(0).to(points.device)).squeeze(0)
return box_idx
Label
COORDINATE TRANSFORM FOR INFERENCED DATA
LIDAR COORDINATE —calibrated sensors —> EGO COODINATE —-ego pose—> GLOBAL COODINATE
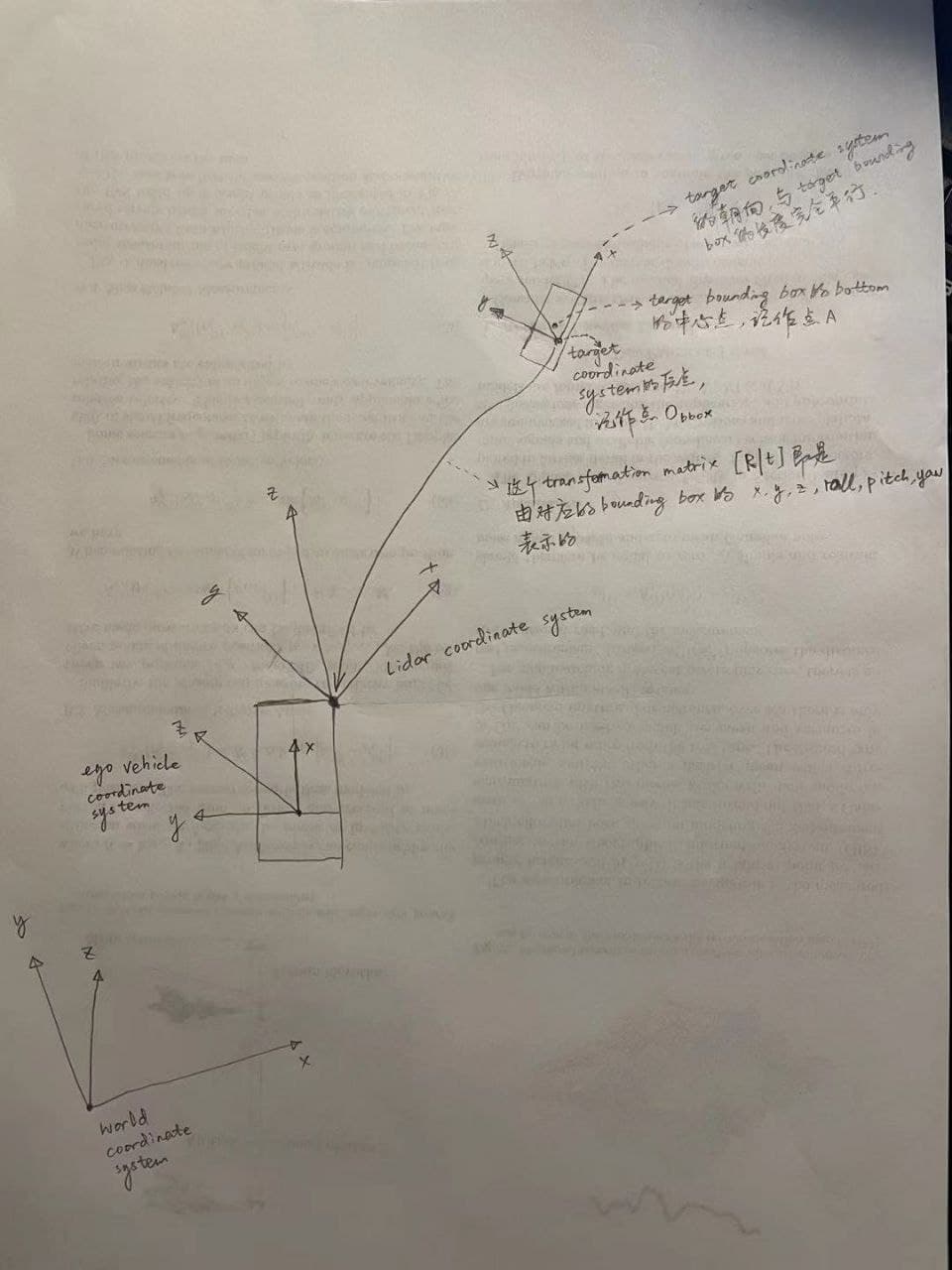
每一个bounding box的(x, y, z, yaw, pitch, roll)应该指的是,target bounding box本身这个坐标系(任何一个向量本身可以看做一个由向量起点为原点,向量朝向为x轴的一个坐标系)的原点在Lidar coordinate system下的位置(position)以及target bounding box本身这个坐标系的x轴朝向在Lidar coordinate system下的pose(yaw, pitch, roll)。而size_x, size_y, size_z即bounding box的长宽高(因为target bounding box本身这个坐标系的pose和bounding box的pose一致)。可是因为target bounding box本身这个坐标系的原点并非bounding box的Bottom平面中心点,所以想要表示bounding box的Bottom平面中心点在Lidar coordinate system下的位置话,需要在x轴平移0.5,y轴平移0.5。这是它那个The relative coordinate of bottom center in a LiDAR box is (0.5, 0.5, 0)表示的含义
Information required inorder to do the coordinate transformation.
ego_pose
Ego vehicle pose at a particular timestamp. Given with respect to global coordinate system of the log’s map. The ego_pose is the output of a lidar map-based localization algorithm described in our paper. The localization is 2-dimensional in the x-y plane.
ego_pose {
"token": <str> -- Unique record identifier.
"translation": <float> [3] -- Coordinate system origin in meters: x, y, z. Note that z is always 0.
"rotation": <float> [4] -- Coordinate system orientation as quaternion: w, x, y, z.
"timestamp": <int> -- Unix time stamp.
}
calibrated_sensor
Definition of a particular sensor (lidar/radar/camera) as calibrated on a particular vehicle. All extrinsic parameters are given with respect to the ego vehicle body frame. All camera images come undistorted and rectified.
calibrated_sensor {
"token": <str> -- Unique record identifier.
"sensor_token": <str> -- Foreign key pointing to the sensor type.
"translation": <float> [3] -- Coordinate system origin in meters: x, y, z.
"rotation": <float> [4] -- Coordinate system orientation as quaternion: w, x, y, z.
"camera_intrinsic": <float> [3, 3] -- Intrinsic camera calibration. Empty for sensors that are not cameras.
}
3D visualization of the point cloud data(pcd)
This is an optional step since we don’t really need 3d visualization here, yet it is always a good idea to have more access to the dataset at hand.
This is a straight forward process, you convert .pcd file to .obj file, which can be done through the nuscenes_devkit or mmlab api.
There are plenty 3d rendering engines, such as open3d or meshlab
The following is the result:
Nuscenes Dataset Tutorials
nuScenes devkit tutorial¶
Welcome to the nuScenes tutorial. This demo assumes the database itself is available at /data/sets/nuscenes, and loads a mini version of the full dataset.
A Gentle Introduction to nuScenes¶
In this part of the tutorial, let us go through a top-down introduction of our database. Our dataset comprises of elemental building blocks that are the following:
log- Log information from which the data was extracted.scene- 20 second snippet of a car's journey.sample- An annotated snapshot of a scene at a particular timestamp.sample_data- Data collected from a particular sensor.ego_pose- Ego vehicle poses at a particular timestamp.sensor- A specific sensor type.calibrated sensor- Definition of a particular sensor as calibrated on a particular vehicle.instance- Enumeration of all object instance we observed.category- Taxonomy of object categories (e.g. vehicle, human).attribute- Property of an instance that can change while the category remains the same.visibility- Fraction of pixels visible in all the images collected from 6 different cameras.sample_annotation- An annotated instance of an object within our interest.map- Map data that is stored as binary semantic masks from a top-down view.
The database schema is visualized below. For more information see the nuScenes schema page.

Google Colab (optional)¶
![]()
If you are running this notebook in Google Colab, you can uncomment the cell below and run it; everything will be set up nicely for you. Otherwise, manually set up everything.
#!mkdir -p /data/sets/nuscenes # Make the directory to store the nuScenes dataset in.
# !wget https://www.nuscenes.org/data/v1.0-mini.tgz # Download the nuScenes mini split.
# !tar -xf v1.0-mini.tgz -C /data/sets/nuscenes # Uncompress the nuScenes mini split.
# !pip install nuscenes-devkit &> /dev/null # Install nuScenes.
mkdir: cannot create directory ‘/data’: Permission denied
Initialization¶
%matplotlib inline
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-mini', dataroot='../../../mini_dataset', verbose=True)
====== Loading NuScenes tables for version v1.0-mini... 23 category, 8 attribute, 4 visibility, 911 instance, 12 sensor, 120 calibrated_sensor, 31206 ego_pose, 8 log, 10 scene, 404 sample, 31206 sample_data, 18538 sample_annotation, 4 map, Done loading in 0.884 seconds. ====== Reverse indexing ... Done reverse indexing in 0.1 seconds. ======
A look at the dataset¶
1. scene¶
nuScenes is a large scale database that features annotated samples across 1000 scenes of approximately 20 seconds each. Let's take a look at the scenes that we have in the loaded database.
nusc.list_scenes()
scene-0061, Parked truck, construction, intersectio... [18-07-24 03:28:47] 19s, singapore-onenorth, #anns:4622 scene-0103, Many peds right, wait for turning car, ... [18-08-01 19:26:43] 19s, boston-seaport, #anns:2046 scene-0655, Parking lot, parked cars, jaywalker, be... [18-08-27 15:51:32] 20s, boston-seaport, #anns:2332 scene-0553, Wait at intersection, bicycle, large tr... [18-08-28 20:48:16] 20s, boston-seaport, #anns:1950 scene-0757, Arrive at busy intersection, bus, wait ... [18-08-30 19:25:08] 20s, boston-seaport, #anns:592 scene-0796, Scooter, peds on sidewalk, bus, cars, t... [18-10-02 02:52:24] 20s, singapore-queensto, #anns:708 scene-0916, Parking lot, bicycle rack, parked bicyc... [18-10-08 07:37:13] 20s, singapore-queensto, #anns:2387 scene-1077, Night, big street, bus stop, high speed... [18-11-21 11:39:27] 20s, singapore-hollandv, #anns:890 scene-1094, Night, after rain, many peds, PMD, ped ... [18-11-21 11:47:27] 19s, singapore-hollandv, #anns:1762 scene-1100, Night, peds in sidewalk, peds cross cro... [18-11-21 11:49:47] 19s, singapore-hollandv, #anns:935
Let's look at a scene metadata
my_scene = nusc.scene[0]
my_scene
{'token': 'cc8c0bf57f984915a77078b10eb33198',
'log_token': '7e25a2c8ea1f41c5b0da1e69ecfa71a2',
'nbr_samples': 39,
'first_sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'last_sample_token': 'ed5fc18c31904f96a8f0dbb99ff069c0',
'name': 'scene-0061',
'description': 'Parked truck, construction, intersection, turn left, following a van'}
2. sample¶
In scenes, we annotate our data every half a second (2 Hz).
We define sample as an annotated keyframe of a scene at a given timestamp. A keyframe is a frame where the time-stamps of data from all the sensors should be very close to the time-stamp of the sample it points to.
Now, let us look at the first annotated sample in this scene.
first_sample_token = my_scene['first_sample_token']
# The rendering command below is commented out because it tends to crash in notebooks
nusc.render_sample(first_sample_token)

Let's examine its metadata
my_sample = nusc.get('sample', first_sample_token)
my_sample
{'token': 'ca9a282c9e77460f8360f564131a8af5',
'timestamp': 1532402927647951,
'prev': '',
'next': '39586f9d59004284a7114a68825e8eec',
'scene_token': 'cc8c0bf57f984915a77078b10eb33198',
'data': {'RADAR_FRONT': '37091c75b9704e0daa829ba56dfa0906',
'RADAR_FRONT_LEFT': '11946c1461d14016a322916157da3c7d',
'RADAR_FRONT_RIGHT': '491209956ee3435a9ec173dad3aaf58b',
'RADAR_BACK_LEFT': '312aa38d0e3e4f01b3124c523e6f9776',
'RADAR_BACK_RIGHT': '07b30d5eb6104e79be58eadf94382bc1',
'LIDAR_TOP': '9d9bf11fb0e144c8b446d54a8a00184f',
'CAM_FRONT': 'e3d495d4ac534d54b321f50006683844',
'CAM_FRONT_RIGHT': 'aac7867ebf4f446395d29fbd60b63b3b',
'CAM_BACK_RIGHT': '79dbb4460a6b40f49f9c150cb118247e',
'CAM_BACK': '03bea5763f0f4722933508d5999c5fd8',
'CAM_BACK_LEFT': '43893a033f9c46d4a51b5e08a67a1eb7',
'CAM_FRONT_LEFT': 'fe5422747a7d4268a4b07fc396707b23'},
'anns': ['ef63a697930c4b20a6b9791f423351da',
'6b89da9bf1f84fd6a5fbe1c3b236f809',
'924ee6ac1fed440a9d9e3720aac635a0',
'91e3608f55174a319246f361690906ba',
'cd051723ed9c40f692b9266359f547af',
'36d52dfedd764b27863375543c965376',
'70af124fceeb433ea73a79537e4bea9e',
'63b89fe17f3e41ecbe28337e0e35db8e',
'e4a3582721c34f528e3367f0bda9485d',
'fcb2332977ed4203aa4b7e04a538e309',
'a0cac1c12246451684116067ae2611f6',
'02248ff567e3497c957c369dc9a1bd5c',
'9db977e264964c2887db1e37113cddaa',
'ca9c5dd6cf374aa980fdd81022f016fd',
'179b8b54ee74425893387ebc09ee133d',
'5b990ac640bf498ca7fd55eaf85d3e12',
'16140fbf143d4e26a4a7613cbd3aa0e8',
'54939f11a73d4398b14aeef500bf0c23',
'83d881a6b3d94ef3a3bc3b585cc514f8',
'74986f1604f047b6925d409915265bf7',
'e86330c5538c4858b8d3ffe874556cc5',
'a7bd5bb89e27455bbb3dba89a576b6a1',
'fbd9d8c939b24f0eb6496243a41e8c41',
'198023a1fb5343a5b6fad033ab8b7057',
'ffeafb90ecd5429cba23d0be9a5b54ee',
'cc636a58e27e446cbdd030c14f3718fd',
'076a7e3ec6244d3b84e7df5ebcbac637',
'0603fbaef1234c6c86424b163d2e3141',
'd76bd5dcc62f4c57b9cece1c7bcfabc5',
'5acb6c71bcd64aa188804411b28c4c8f',
'49b74a5f193c4759b203123b58ca176d',
'77519174b48f4853a895f58bb8f98661',
'c5e9455e98bb42c0af7d1990db1df0c9',
'fcc5b4b5c4724179ab24962a39ca6d65',
'791d1ca7e228433fa50b01778c32449a',
'316d20eb238c43ef9ee195642dd6e3fe',
'cda0a9085607438c9b1ea87f4360dd64',
'e865152aaa194f22b97ad0078c012b21',
'7962506dbc24423aa540a5e4c7083dad',
'29cca6a580924b72a90b9dd6e7710d3e',
'a6f7d4bb60374f868144c5ba4431bf4c',
'f1ae3f713ba946069fa084a6b8626fbf',
'd7af8ede316546f68d4ab4f3dbf03f88',
'91cb8f15ed4444e99470d43515e50c1d',
'bc638d33e89848f58c0b3ccf3900c8bb',
'26fb370c13f844de9d1830f6176ebab6',
'7e66fdf908d84237943c833e6c1b317a',
'67c5dbb3ddcc4aff8ec5140930723c37',
'eaf2532c820740ae905bb7ed78fb1037',
'3e2d17fa9aa5484d9cabc1dfca532193',
'de6bd5ffbed24aa59c8891f8d9c32c44',
'9d51d699f635478fbbcd82a70396dd62',
'b7cbc6d0e80e4dfda7164871ece6cb71',
'563a3f547bd64a2f9969278c5ef447fd',
'df8917888b81424f8c0670939e61d885',
'bb3ef5ced8854640910132b11b597348',
'a522ce1d7f6545d7955779f25d01783b',
'1fafb2468af5481ca9967407af219c32',
'05de82bdb8484623906bb9d97ae87542',
'bfedb0d85e164b7697d1e72dd971fb72',
'ca0f85b4f0d44beb9b7ff87b1ab37ff5',
'bca4bbfdef3d4de980842f28be80b3ca',
'a834fb0389a8453c810c3330e3503e16',
'6c804cb7d78943b195045082c5c2d7fa',
'adf1594def9e4722b952fea33b307937',
'49f76277d07541c5a584aa14c9d28754',
'15a3b4d60b514db5a3468e2aef72a90c',
'18cc2837f2b9457c80af0761a0b83ccc',
'2bfcc693ae9946daba1d9f2724478fd4']}
A useful method is list_sample() which lists all related sample_data keyframes and sample_annotation associated with a sample which we will discuss in detail in the subsequent parts.
nusc.list_sample(my_sample['token'])
Sample: ca9a282c9e77460f8360f564131a8af5 sample_data_token: 37091c75b9704e0daa829ba56dfa0906, mod: radar, channel: RADAR_FRONT sample_data_token: 11946c1461d14016a322916157da3c7d, mod: radar, channel: RADAR_FRONT_LEFT sample_data_token: 491209956ee3435a9ec173dad3aaf58b, mod: radar, channel: RADAR_FRONT_RIGHT sample_data_token: 312aa38d0e3e4f01b3124c523e6f9776, mod: radar, channel: RADAR_BACK_LEFT sample_data_token: 07b30d5eb6104e79be58eadf94382bc1, mod: radar, channel: RADAR_BACK_RIGHT sample_data_token: 9d9bf11fb0e144c8b446d54a8a00184f, mod: lidar, channel: LIDAR_TOP sample_data_token: e3d495d4ac534d54b321f50006683844, mod: camera, channel: CAM_FRONT sample_data_token: aac7867ebf4f446395d29fbd60b63b3b, mod: camera, channel: CAM_FRONT_RIGHT sample_data_token: 79dbb4460a6b40f49f9c150cb118247e, mod: camera, channel: CAM_BACK_RIGHT sample_data_token: 03bea5763f0f4722933508d5999c5fd8, mod: camera, channel: CAM_BACK sample_data_token: 43893a033f9c46d4a51b5e08a67a1eb7, mod: camera, channel: CAM_BACK_LEFT sample_data_token: fe5422747a7d4268a4b07fc396707b23, mod: camera, channel: CAM_FRONT_LEFT sample_annotation_token: ef63a697930c4b20a6b9791f423351da, category: human.pedestrian.adult sample_annotation_token: 6b89da9bf1f84fd6a5fbe1c3b236f809, category: human.pedestrian.adult sample_annotation_token: 924ee6ac1fed440a9d9e3720aac635a0, category: vehicle.car sample_annotation_token: 91e3608f55174a319246f361690906ba, category: human.pedestrian.adult sample_annotation_token: cd051723ed9c40f692b9266359f547af, category: movable_object.trafficcone sample_annotation_token: 36d52dfedd764b27863375543c965376, category: vehicle.bicycle sample_annotation_token: 70af124fceeb433ea73a79537e4bea9e, category: human.pedestrian.adult sample_annotation_token: 63b89fe17f3e41ecbe28337e0e35db8e, category: vehicle.car sample_annotation_token: e4a3582721c34f528e3367f0bda9485d, category: human.pedestrian.adult sample_annotation_token: fcb2332977ed4203aa4b7e04a538e309, category: movable_object.barrier sample_annotation_token: a0cac1c12246451684116067ae2611f6, category: movable_object.barrier sample_annotation_token: 02248ff567e3497c957c369dc9a1bd5c, category: human.pedestrian.adult sample_annotation_token: 9db977e264964c2887db1e37113cddaa, category: human.pedestrian.adult sample_annotation_token: ca9c5dd6cf374aa980fdd81022f016fd, category: human.pedestrian.adult sample_annotation_token: 179b8b54ee74425893387ebc09ee133d, category: human.pedestrian.adult sample_annotation_token: 5b990ac640bf498ca7fd55eaf85d3e12, category: movable_object.barrier sample_annotation_token: 16140fbf143d4e26a4a7613cbd3aa0e8, category: vehicle.car sample_annotation_token: 54939f11a73d4398b14aeef500bf0c23, category: human.pedestrian.adult sample_annotation_token: 83d881a6b3d94ef3a3bc3b585cc514f8, category: vehicle.truck sample_annotation_token: 74986f1604f047b6925d409915265bf7, category: vehicle.car sample_annotation_token: e86330c5538c4858b8d3ffe874556cc5, category: human.pedestrian.adult sample_annotation_token: a7bd5bb89e27455bbb3dba89a576b6a1, category: movable_object.barrier sample_annotation_token: fbd9d8c939b24f0eb6496243a41e8c41, category: movable_object.barrier sample_annotation_token: 198023a1fb5343a5b6fad033ab8b7057, category: movable_object.barrier sample_annotation_token: ffeafb90ecd5429cba23d0be9a5b54ee, category: movable_object.trafficcone sample_annotation_token: cc636a58e27e446cbdd030c14f3718fd, category: movable_object.barrier sample_annotation_token: 076a7e3ec6244d3b84e7df5ebcbac637, category: vehicle.bus.rigid sample_annotation_token: 0603fbaef1234c6c86424b163d2e3141, category: human.pedestrian.adult sample_annotation_token: d76bd5dcc62f4c57b9cece1c7bcfabc5, category: human.pedestrian.adult sample_annotation_token: 5acb6c71bcd64aa188804411b28c4c8f, category: movable_object.barrier sample_annotation_token: 49b74a5f193c4759b203123b58ca176d, category: human.pedestrian.adult sample_annotation_token: 77519174b48f4853a895f58bb8f98661, category: human.pedestrian.adult sample_annotation_token: c5e9455e98bb42c0af7d1990db1df0c9, category: movable_object.barrier sample_annotation_token: fcc5b4b5c4724179ab24962a39ca6d65, category: human.pedestrian.adult sample_annotation_token: 791d1ca7e228433fa50b01778c32449a, category: human.pedestrian.adult sample_annotation_token: 316d20eb238c43ef9ee195642dd6e3fe, category: movable_object.barrier sample_annotation_token: cda0a9085607438c9b1ea87f4360dd64, category: vehicle.car sample_annotation_token: e865152aaa194f22b97ad0078c012b21, category: movable_object.barrier sample_annotation_token: 7962506dbc24423aa540a5e4c7083dad, category: movable_object.barrier sample_annotation_token: 29cca6a580924b72a90b9dd6e7710d3e, category: human.pedestrian.adult sample_annotation_token: a6f7d4bb60374f868144c5ba4431bf4c, category: vehicle.car sample_annotation_token: f1ae3f713ba946069fa084a6b8626fbf, category: movable_object.barrier sample_annotation_token: d7af8ede316546f68d4ab4f3dbf03f88, category: movable_object.barrier sample_annotation_token: 91cb8f15ed4444e99470d43515e50c1d, category: vehicle.construction sample_annotation_token: bc638d33e89848f58c0b3ccf3900c8bb, category: movable_object.barrier sample_annotation_token: 26fb370c13f844de9d1830f6176ebab6, category: vehicle.car sample_annotation_token: 7e66fdf908d84237943c833e6c1b317a, category: human.pedestrian.adult sample_annotation_token: 67c5dbb3ddcc4aff8ec5140930723c37, category: human.pedestrian.adult sample_annotation_token: eaf2532c820740ae905bb7ed78fb1037, category: human.pedestrian.adult sample_annotation_token: 3e2d17fa9aa5484d9cabc1dfca532193, category: movable_object.trafficcone sample_annotation_token: de6bd5ffbed24aa59c8891f8d9c32c44, category: human.pedestrian.adult sample_annotation_token: 9d51d699f635478fbbcd82a70396dd62, category: human.pedestrian.adult sample_annotation_token: b7cbc6d0e80e4dfda7164871ece6cb71, category: vehicle.truck sample_annotation_token: 563a3f547bd64a2f9969278c5ef447fd, category: human.pedestrian.adult sample_annotation_token: df8917888b81424f8c0670939e61d885, category: human.pedestrian.adult sample_annotation_token: bb3ef5ced8854640910132b11b597348, category: human.pedestrian.adult sample_annotation_token: a522ce1d7f6545d7955779f25d01783b, category: human.pedestrian.adult sample_annotation_token: 1fafb2468af5481ca9967407af219c32, category: human.pedestrian.adult sample_annotation_token: 05de82bdb8484623906bb9d97ae87542, category: human.pedestrian.adult sample_annotation_token: bfedb0d85e164b7697d1e72dd971fb72, category: movable_object.pushable_pullable sample_annotation_token: ca0f85b4f0d44beb9b7ff87b1ab37ff5, category: movable_object.barrier sample_annotation_token: bca4bbfdef3d4de980842f28be80b3ca, category: movable_object.barrier sample_annotation_token: a834fb0389a8453c810c3330e3503e16, category: human.pedestrian.adult sample_annotation_token: 6c804cb7d78943b195045082c5c2d7fa, category: movable_object.barrier sample_annotation_token: adf1594def9e4722b952fea33b307937, category: movable_object.barrier sample_annotation_token: 49f76277d07541c5a584aa14c9d28754, category: vehicle.car sample_annotation_token: 15a3b4d60b514db5a3468e2aef72a90c, category: movable_object.barrier sample_annotation_token: 18cc2837f2b9457c80af0761a0b83ccc, category: movable_object.barrier sample_annotation_token: 2bfcc693ae9946daba1d9f2724478fd4, category: movable_object.barrier
3. sample_data¶
The nuScenes dataset contains data that is collected from a full sensor suite. Hence, for each snapshot of a scene, we provide references to a family of data that is collected from these sensors.
We provide a data key to access these:
my_sample['data']
{'RADAR_FRONT': '37091c75b9704e0daa829ba56dfa0906',
'RADAR_FRONT_LEFT': '11946c1461d14016a322916157da3c7d',
'RADAR_FRONT_RIGHT': '491209956ee3435a9ec173dad3aaf58b',
'RADAR_BACK_LEFT': '312aa38d0e3e4f01b3124c523e6f9776',
'RADAR_BACK_RIGHT': '07b30d5eb6104e79be58eadf94382bc1',
'LIDAR_TOP': '9d9bf11fb0e144c8b446d54a8a00184f',
'CAM_FRONT': 'e3d495d4ac534d54b321f50006683844',
'CAM_FRONT_RIGHT': 'aac7867ebf4f446395d29fbd60b63b3b',
'CAM_BACK_RIGHT': '79dbb4460a6b40f49f9c150cb118247e',
'CAM_BACK': '03bea5763f0f4722933508d5999c5fd8',
'CAM_BACK_LEFT': '43893a033f9c46d4a51b5e08a67a1eb7',
'CAM_FRONT_LEFT': 'fe5422747a7d4268a4b07fc396707b23'}
Notice that the keys are referring to the different sensors that form our sensor suite. Let's take a look at the metadata of a sample_data taken from CAM_FRONT.
sensor = 'CAM_FRONT'
cam_front_data = nusc.get('sample_data', my_sample['data'][sensor])
cam_front_data
{'token': 'e3d495d4ac534d54b321f50006683844',
'sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'ego_pose_token': 'e3d495d4ac534d54b321f50006683844',
'calibrated_sensor_token': '1d31c729b073425e8e0202c5c6e66ee1',
'timestamp': 1532402927612460,
'fileformat': 'jpg',
'is_key_frame': True,
'height': 900,
'width': 1600,
'filename': 'samples/CAM_FRONT/n015-2018-07-24-11-22-45+0800__CAM_FRONT__1532402927612460.jpg',
'prev': '',
'next': '68e8e98cf7b0487baa139df808641db7',
'sensor_modality': 'camera',
'channel': 'CAM_FRONT'}
We can also render the sample_data at a particular sensor.
nusc.render_sample_data(cam_front_data['token'])

4. sample_annotation¶
sample_annotation refers to any bounding box defining the position of an object seen in a sample. All location data is given with respect to the global coordinate system. Let's examine an example from our sample above.
my_annotation_token = my_sample['anns'][18]
my_annotation_metadata = nusc.get('sample_annotation', my_annotation_token)
my_annotation_metadata
{'token': '83d881a6b3d94ef3a3bc3b585cc514f8',
'sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'instance_token': 'e91afa15647c4c4994f19aeb302c7179',
'visibility_token': '4',
'attribute_tokens': ['58aa28b1c2a54dc88e169808c07331e3'],
'translation': [409.989, 1164.099, 1.623],
'size': [2.877, 10.201, 3.595],
'rotation': [-0.5828819500503033, 0.0, 0.0, 0.812556848660791],
'prev': '',
'next': 'f3721bdfd7ee4fd2a4f94874286df471',
'num_lidar_pts': 495,
'num_radar_pts': 13,
'category_name': 'vehicle.truck'}
We can also render an annotation to have a closer look.
nusc.render_annotation(my_annotation_token)

5. instance¶
Object instance are instances that need to be detected or tracked by an AV (e.g a particular vehicle, pedestrian). Let us examine an instance metadata
my_instance = nusc.instance[599]
my_instance
{'token': '9cba9cd8af85487fb010652c90d845b5',
'category_token': 'fedb11688db84088883945752e480c2c',
'nbr_annotations': 16,
'first_annotation_token': '77afa772cb4a4e5c8a5a53f2019bdba0',
'last_annotation_token': '6fed6d902e5e487abb7444f62e1a2341'}
We generally track an instance across different frames in a particular scene. However, we do not track them across different scenes. In this example, we have 16 annotated samples for this instance across a particular scene.
instance_token = my_instance['token']
nusc.render_instance(instance_token)

An instance record takes note of its first and last annotation token. Let's render them
print("First annotated sample of this instance:")
nusc.render_annotation(my_instance['first_annotation_token'])
First annotated sample of this instance:

print("Last annotated sample of this instance")
nusc.render_annotation(my_instance['last_annotation_token'])
Last annotated sample of this instance

6. category¶
A category is the object assignment of an annotation. Let's look at the category table we have in our database. The table contains the taxonomy of different object categories and also list the subcategories (delineated by a period).
nusc.list_categories()
Category stats for split v1.0-mini: human.pedestrian.adult n= 4765, width= 0.68±0.11, len= 0.73±0.17, height= 1.76±0.12, lw_aspect= 1.08±0.23 human.pedestrian.child n= 46, width= 0.46±0.08, len= 0.45±0.09, height= 1.37±0.06, lw_aspect= 0.97±0.05 human.pedestrian.constructi n= 193, width= 0.69±0.07, len= 0.74±0.12, height= 1.78±0.05, lw_aspect= 1.07±0.16 human.pedestrian.personal_m n= 25, width= 0.83±0.00, len= 1.28±0.00, height= 1.87±0.00, lw_aspect= 1.55±0.00 human.pedestrian.police_off n= 11, width= 0.59±0.00, len= 0.47±0.00, height= 1.81±0.00, lw_aspect= 0.80±0.00 movable_object.barrier n= 2323, width= 2.32±0.49, len= 0.61±0.11, height= 1.06±0.10, lw_aspect= 0.28±0.09 movable_object.debris n= 13, width= 0.43±0.00, len= 1.43±0.00, height= 0.46±0.00, lw_aspect= 3.35±0.00 movable_object.pushable_pul n= 82, width= 0.51±0.06, len= 0.79±0.10, height= 1.04±0.20, lw_aspect= 1.55±0.18 movable_object.trafficcone n= 1378, width= 0.47±0.14, len= 0.45±0.07, height= 0.78±0.13, lw_aspect= 0.99±0.12 static_object.bicycle_rack n= 54, width= 2.67±1.46, len=10.09±6.19, height= 1.40±0.00, lw_aspect= 5.97±4.02 vehicle.bicycle n= 243, width= 0.64±0.12, len= 1.82±0.14, height= 1.39±0.34, lw_aspect= 2.94±0.41 vehicle.bus.bendy n= 57, width= 2.83±0.09, len= 9.23±0.33, height= 3.32±0.07, lw_aspect= 3.27±0.22 vehicle.bus.rigid n= 353, width= 2.95±0.26, len=11.46±1.79, height= 3.80±0.62, lw_aspect= 3.88±0.57 vehicle.car n= 7619, width= 1.92±0.16, len= 4.62±0.36, height= 1.69±0.21, lw_aspect= 2.41±0.18 vehicle.construction n= 196, width= 2.58±0.35, len= 5.57±1.57, height= 2.38±0.33, lw_aspect= 2.18±0.62 vehicle.motorcycle n= 471, width= 0.68±0.21, len= 1.95±0.38, height= 1.47±0.20, lw_aspect= 3.00±0.62 vehicle.trailer n= 60, width= 2.28±0.08, len=10.14±5.69, height= 3.71±0.27, lw_aspect= 4.37±2.41 vehicle.truck n= 649, width= 2.35±0.34, len= 6.50±1.56, height= 2.62±0.68, lw_aspect= 2.75±0.37
A category record contains the name and the description of that particular category.
nusc.category[9]
{'token': 'dfd26f200ade4d24b540184e16050022',
'name': 'vehicle.motorcycle',
'description': 'Gasoline or electric powered 2-wheeled vehicle designed to move rapidly (at the speed of standard cars) on the road surface. This category includes all motorcycles, vespas and scooters.'}
Refer to instructions_nuscenes.md for the definitions of the different categories.
7. attribute¶
An attribute is a property of an instance that may change throughout different parts of a scene while the category remains the same. Here we list the provided attributes and the number of annotations associated with a particular attribute.
nusc.list_attributes()
cycle.with_rider: 305 cycle.without_rider: 434 pedestrian.moving: 3875 pedestrian.sitting_lying_down: 111 pedestrian.standing: 1029 vehicle.moving: 2715 vehicle.parked: 4674 vehicle.stopped: 1545
Let's take a look at an example how an attribute may change over one scene
my_instance = nusc.instance[27]
first_token = my_instance['first_annotation_token']
last_token = my_instance['last_annotation_token']
nbr_samples = my_instance['nbr_annotations']
current_token = first_token
i = 0
found_change = False
while current_token != last_token:
current_ann = nusc.get('sample_annotation', current_token)
current_attr = nusc.get('attribute', current_ann['attribute_tokens'][0])['name']
if i == 0:
pass
elif current_attr != last_attr:
print("Changed from `{}` to `{}` at timestamp {} out of {} annotated timestamps".format(last_attr, current_attr, i, nbr_samples))
found_change = True
next_token = current_ann['next']
current_token = next_token
last_attr = current_attr
i += 1
Changed from `pedestrian.moving` to `pedestrian.standing` at timestamp 21 out of 39 annotated timestamps
8. visibility¶
visibility is defined as the fraction of pixels of a particular annotation that are visible over the 6 camera feeds, grouped into 4 bins.
nusc.visibility
[{'description': 'visibility of whole object is between 0 and 40%',
'token': '1',
'level': 'v0-40'},
{'description': 'visibility of whole object is between 40 and 60%',
'token': '2',
'level': 'v40-60'},
{'description': 'visibility of whole object is between 60 and 80%',
'token': '3',
'level': 'v60-80'},
{'description': 'visibility of whole object is between 80 and 100%',
'token': '4',
'level': 'v80-100'}]
Let's look at an example sample_annotation with 80-100% visibility
anntoken = 'a7d0722bce164f88adf03ada491ea0ba'
visibility_token = nusc.get('sample_annotation', anntoken)['visibility_token']
print("Visibility: {}".format(nusc.get('visibility', visibility_token)))
nusc.render_annotation(anntoken)
Visibility: {'description': 'visibility of whole object is between 80 and 100%', 'token': '4', 'level': 'v80-100'}

Let's look at an example sample_annotation with 0-40% visibility
anntoken = '9f450bf6b7454551bbbc9a4c6e74ef2e'
visibility_token = nusc.get('sample_annotation', anntoken)['visibility_token']
print("Visibility: {}".format(nusc.get('visibility', visibility_token)))
nusc.render_annotation(anntoken)
Visibility: {'description': 'visibility of whole object is between 0 and 40%', 'token': '1', 'level': 'v0-40'}

9. sensor¶
The nuScenes dataset consists of data collected from our full sensor suite which consists of:
- 1 x LIDAR,
- 5 x RADAR,
- 6 x cameras,
nusc.sensor
[{'token': '725903f5b62f56118f4094b46a4470d8',
'channel': 'CAM_FRONT',
'modality': 'camera'},
{'token': 'ce89d4f3050b5892b33b3d328c5e82a3',
'channel': 'CAM_BACK',
'modality': 'camera'},
{'token': 'a89643a5de885c6486df2232dc954da2',
'channel': 'CAM_BACK_LEFT',
'modality': 'camera'},
{'token': 'ec4b5d41840a509984f7ec36419d4c09',
'channel': 'CAM_FRONT_LEFT',
'modality': 'camera'},
{'token': '2f7ad058f1ac5557bf321c7543758f43',
'channel': 'CAM_FRONT_RIGHT',
'modality': 'camera'},
{'token': 'ca7dba2ec9f95951bbe67246f7f2c3f7',
'channel': 'CAM_BACK_RIGHT',
'modality': 'camera'},
{'token': 'dc8b396651c05aedbb9cdaae573bb567',
'channel': 'LIDAR_TOP',
'modality': 'lidar'},
{'token': '47fcd48f71d75e0da5c8c1704a9bfe0a',
'channel': 'RADAR_FRONT',
'modality': 'radar'},
{'token': '232a6c4dc628532e81de1c57120876e9',
'channel': 'RADAR_FRONT_RIGHT',
'modality': 'radar'},
{'token': '1f69f87a4e175e5ba1d03e2e6d9bcd27',
'channel': 'RADAR_FRONT_LEFT',
'modality': 'radar'},
{'token': 'df2d5b8be7be55cca33c8c92384f2266',
'channel': 'RADAR_BACK_LEFT',
'modality': 'radar'},
{'token': '5c29dee2f70b528a817110173c2e71b9',
'channel': 'RADAR_BACK_RIGHT',
'modality': 'radar'}]
Every sample_data has a record on which sensor the data is collected from (note the "channel" key)
nusc.sample_data[10]
{'token': '2ecfec536d984fb491098c9db1404117',
'sample_token': '356d81f38dd9473ba590f39e266f54e5',
'ego_pose_token': '2ecfec536d984fb491098c9db1404117',
'calibrated_sensor_token': 'f4d2a6c281f34a7eb8bb033d82321f79',
'timestamp': 1532402928269133,
'fileformat': 'pcd',
'is_key_frame': False,
'height': 0,
'width': 0,
'filename': 'sweeps/RADAR_FRONT/n015-2018-07-24-11-22-45+0800__RADAR_FRONT__1532402928269133.pcd',
'prev': 'b933bbcb4ee84a7eae16e567301e1df2',
'next': '79ef24d1eba84f5abaeaf76655ef1036',
'sensor_modality': 'radar',
'channel': 'RADAR_FRONT'}
10. calibrated_sensor¶
calibrated_sensor consists of the definition of a particular sensor (lidar/radar/camera) as calibrated on a particular vehicle. Let us look at an example.
nusc.calibrated_sensor[0]
{'token': 'f4d2a6c281f34a7eb8bb033d82321f79',
'sensor_token': '47fcd48f71d75e0da5c8c1704a9bfe0a',
'translation': [3.412, 0.0, 0.5],
'rotation': [0.9999984769132877, 0.0, 0.0, 0.0017453283658983088],
'camera_intrinsic': []}
Note that the translation and the rotation parameters are given with respect to the ego vehicle body frame.
11. ego_pose¶
ego_pose contains information about the location (encoded in translation) and the orientation (encoded in rotation) of the ego vehicle, with respect to the global coordinate system.
nusc.ego_pose[0]
{'token': '5ace90b379af485b9dcb1584b01e7212',
'timestamp': 1532402927814384,
'rotation': [0.5731787718287827,
-0.0015811634307974854,
0.013859363182046986,
-0.8193116095230444],
'translation': [410.77878632230204, 1179.4673290964536, 0.0]}
Note that the number of ego_pose records in our loaded database is the same as the number of sample_data records. These two records exhibit a one-to-one correspondence.
12. log¶
The log table contains log information from which the data was extracted. A log record corresponds to one journey of our ego vehicle along a predefined route. Let's check the number of logs and the metadata of a log.
print("Number of `logs` in our loaded database: {}".format(len(nusc.log)))
Number of `logs` in our loaded database: 8
nusc.log[0]
{'token': '7e25a2c8ea1f41c5b0da1e69ecfa71a2',
'logfile': 'n015-2018-07-24-11-22-45+0800',
'vehicle': 'n015',
'date_captured': '2018-07-24',
'location': 'singapore-onenorth',
'map_token': '53992ee3023e5494b90c316c183be829'}
Notice that it contains a variety of information such as the date and location of the log collected. It also gives out information about the map from where the data was collected. Note that one log can contain multiple non-overlapping scenes.
13. map¶
Map information is stored as binary semantic masks from a top-down view. Let's check the number of maps and metadata of a map.
print("There are {} maps masks in the loaded dataset".format(len(nusc.map)))
There are 4 maps masks in the loaded dataset
nusc.map[0]
{'category': 'semantic_prior',
'token': '53992ee3023e5494b90c316c183be829',
'filename': 'maps/53992ee3023e5494b90c316c183be829.png',
'log_tokens': ['0986cb758b1d43fdaa051ab23d45582b',
'1c9b302455ff44a9a290c372b31aa3ce',
'e60234ec7c324789ac7c8441a5e49731',
'46123a03f41e4657adc82ed9ddbe0ba2',
'a5bb7f9dd1884f1ea0de299caefe7ef4',
'bc41a49366734ebf978d6a71981537dc',
'f8699afb7a2247e38549e4d250b4581b',
'd0450edaed4a46f898403f45fa9e5f0d',
'f38ef5a1e9c941aabb2155768670b92a',
'7e25a2c8ea1f41c5b0da1e69ecfa71a2',
'ddc03471df3e4c9bb9663629a4097743',
'31e9939f05c1485b88a8f68ad2cf9fa4',
'783683d957054175bda1b326453a13f4',
'343d984344e440c7952d1e403b572b2a',
'92af2609d31445e5a71b2d895376fed6',
'47620afea3c443f6a761e885273cb531',
'd31dc715d1c34b99bd5afb0e3aea26ed',
'34d0574ea8f340179c82162c6ac069bc',
'd7fd2bb9696d43af901326664e42340b',
'b5622d4dcb0d4549b813b3ffb96fbdc9',
'da04ae0b72024818a6219d8dd138ea4b',
'6b6513e6c8384cec88775cae30b78c0e',
'eda311bda86f4e54857b0554639d6426',
'cfe71bf0b5c54aed8f56d4feca9a7f59',
'ee155e99938a4c2698fed50fc5b5d16a',
'700b800c787842ba83493d9b2775234a'],
'mask': <nuscenes.utils.map_mask.MapMask at 0x7ff1fc8af190>}
nuScenes Basics¶
Let's get a bit technical.
The NuScenes class holds several tables. Each table is a list of records, and each record is a dictionary. For example the first record of the category table is stored at:
nusc.category[0]
{'token': '1fa93b757fc74fb197cdd60001ad8abf',
'name': 'human.pedestrian.adult',
'description': 'Adult subcategory.'}
The category table is simple: it holds the fields name and description. It also has a token field, which is a unique record identifier. Since the record is a dictionary, the token can be accessed like so:
cat_token = nusc.category[0]['token']
cat_token
'1fa93b757fc74fb197cdd60001ad8abf'
If you know the token for any record in the DB you can retrieve the record by doing
nusc.get('category', cat_token)
{'token': '1fa93b757fc74fb197cdd60001ad8abf',
'name': 'human.pedestrian.adult',
'description': 'Adult subcategory.'}
As you can notice, we have recovered the same record!
OK, that was easy. Let's try something harder. Let's look at the sample_annotation table.
nusc.sample_annotation[0]
{'token': '70aecbe9b64f4722ab3c230391a3beb8',
'sample_token': 'cd21dbfc3bd749c7b10a5c42562e0c42',
'instance_token': '6dd2cbf4c24b4caeb625035869bca7b5',
'visibility_token': '4',
'attribute_tokens': ['4d8821270b4a47e3a8a300cbec48188e'],
'translation': [373.214, 1130.48, 1.25],
'size': [0.621, 0.669, 1.642],
'rotation': [0.9831098797903927, 0.0, 0.0, -0.18301629506281616],
'prev': 'a1721876c0944cdd92ebc3c75d55d693',
'next': '1e8e35d365a441a18dd5503a0ee1c208',
'num_lidar_pts': 5,
'num_radar_pts': 0,
'category_name': 'human.pedestrian.adult'}
This also has a token field (they all do). In addition, it has several fields of the format [a-z]*_token, e.g. instance_token. These are foreign keys in database terminology, meaning they point to another table.
Using nusc.get() we can grab any of these in constant time. For example, let's look at the visibility record.
nusc.get('visibility', nusc.sample_annotation[0]['visibility_token'])
{'description': 'visibility of whole object is between 80 and 100%',
'token': '4',
'level': 'v80-100'}
The visibility records indicate how much of an object was visible when it was annotated.
Let's also grab the instance_token
one_instance = nusc.get('instance', nusc.sample_annotation[0]['instance_token'])
one_instance
{'token': '6dd2cbf4c24b4caeb625035869bca7b5',
'category_token': '1fa93b757fc74fb197cdd60001ad8abf',
'nbr_annotations': 39,
'first_annotation_token': 'ef63a697930c4b20a6b9791f423351da',
'last_annotation_token': '8bb63134d48840aaa2993f490855ff0d'}
This points to the instance table. This table enumerate the object instances we have encountered in each
scene. This way we can connect all annotations of a particular object.
If you look carefully at the README tables, you will see that the sample_annotation table points to the instance table, but the instance table doesn't list all annotations that point to it.
So how can we recover all sample_annotations for a particular object instance? There are two ways:
Use nusc.field2token(). Let's try it:
ann_tokens = nusc.field2token('sample_annotation', 'instance_token', one_instance['token'])
This returns a list of all sample_annotation records with the 'instance_token' == one_instance['token']. Let's store these in a set for now
ann_tokens_field2token = set(ann_tokens)
ann_tokens_field2token
{'05e0ad1194804f548be544f2267c7e74',
'060be69422ee4b2a8b239b463b995e92',
'146b2111cc0c401ca09d96777758d81e',
'163d85048698495dbf55a35f613c5fb9',
'17a6843fefcd4b2b811eddbb1ccd708d',
'1de9ad564050444486eb587360cf135f',
'1e8e35d365a441a18dd5503a0ee1c208',
'23f10d5f0d254068941be8797493c7eb',
'2b5948828cdb49e3be6be1320381bbbf',
'3a930d1793434d9a8a87d6eba28ff70e',
'3b24f083c0bf42d695a1040efdab7ffe',
'4e41d9560dbf46cab1568b8ef6a282f3',
'6f371d3f0d7d494eaa6f81daa3df58c0',
'70aecbe9b64f4722ab3c230391a3beb8',
'74f550e3257c4f52af1102c0d49d37b8',
'7670ac8bc5044d5a9e11e205c839385d',
'794fcc425f074a1392206ed925fdbbd8',
'7987617983634b119e383d8a29607fd7',
'7fa3a688931b4500b7ce29d187d3b975',
'807b3e029a6b4e428f6cc82fc26a35a7',
'8bb63134d48840aaa2993f490855ff0d',
'90d94112b9ea4fb691e988b40af5b161',
'913072e56d6c4025b9b47ba085dd6d7c',
'93d5b79041c64693a5b32f1103a39a06',
'9acb7dfed3454f72b2874dda3bdacc48',
'a1721876c0944cdd92ebc3c75d55d693',
'a2b20cdbf1ed4018ac795b8845d5deaa',
'a2f1d09320c3454ba3f2347c4b5903a5',
'a72013a0352a496c9a01832f5666ae31',
'b38209aa7b0c49a5b910e7b774b07bd5',
'b8f593154b8144f58e1e53d3c91ab567',
'b964464ea45d4e9493f324ba8d2a82a3',
'd15155fecf2f440c97bb0781777e18d4',
'e5fe9ea066254609b48eb073e81ef209',
'ed72884bda8a4332bbcb80c285a97929',
'ef63a697930c4b20a6b9791f423351da',
'f503fa3d050f43cca4af2241b674929a',
'f7e190375e1f4e569ba16fcdabf6e4b3',
'f84a0a9fb64e4aab9ccd87e9fbf815e0'}
The nusc.field2token() method is generic and can be used in any similar situation.
- For certain situation, we provide some reverse indices in the tables themselves. This is one such example.
The instance record has a field first_annotation_token which points to the first annotation in time of this instance.
Recovering this record is easy.
ann_record = nusc.get('sample_annotation', one_instance['first_annotation_token'])
ann_record
{'token': 'ef63a697930c4b20a6b9791f423351da',
'sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'instance_token': '6dd2cbf4c24b4caeb625035869bca7b5',
'visibility_token': '1',
'attribute_tokens': ['4d8821270b4a47e3a8a300cbec48188e'],
'translation': [373.256, 1130.419, 0.8],
'size': [0.621, 0.669, 1.642],
'rotation': [0.9831098797903927, 0.0, 0.0, -0.18301629506281616],
'prev': '',
'next': '7987617983634b119e383d8a29607fd7',
'num_lidar_pts': 1,
'num_radar_pts': 0,
'category_name': 'human.pedestrian.adult'}
Now we can traverse all annotations of this instance using the "next" field. Let's try it.
ann_tokens_traverse = set()
ann_tokens_traverse.add(ann_record['token'])
while not ann_record['next'] == "":
ann_record = nusc.get('sample_annotation', ann_record['next'])
ann_tokens_traverse.add(ann_record['token'])
Finally, let's assert that we recovered the same ann_records as we did using nusc.field2token:
print(ann_tokens_traverse == ann_tokens_field2token)
True
Reverse indexing and short-cuts¶
The nuScenes tables are normalized, meaning that each piece of information is only given once.
For example, there is one map record for each log record. Looking at the schema you will notice that the map table has a log_token field, but that the log table does not have a corresponding map_token field. But there are plenty of situations where you have a log, and want to find the corresponding map! So what to do? You can always use the nusc.field2token() method, but that is slow and inconvenient. We therefore add reverse mappings for some common situations including this one.
Further, there are situations where one needs to go through several tables to get a certain piece of information.
Consider, for example, the category name (e.g. human.pedestrian) of a sample_annotation. The sample_annotation table doesn't hold this information since the category is an instance level constant. Instead the sample_annotation table points to a record in the instance table. This, in turn, points to a record in the category table, where finally the name fields stores the required information.
Since it is quite common to want to know the category name of an annotation, we add a category_name field to the sample_annotation table during initialization of the NuScenes class.
In this section, we list the short-cuts and reverse indices that are added to the NuScenes class during initialization. These are all created in the NuScenes.__make_reverse_index__() method.
Reverse indices¶
We add two reverse indices by default.
- A
map_tokenfield is added to thelogrecords. - The
samplerecords have shortcuts to allsample_annotationsfor that record as well assample_datakey-frames. Confernusc.list_sample()method in the previous section for more details on this.
Shortcuts¶
The sample_annotation table has a "category_name" shortcut.
Using shortcut:
catname = nusc.sample_annotation[0]['category_name']
Not using shortcut:
ann_rec = nusc.sample_annotation[0]
inst_rec = nusc.get('instance', ann_rec['instance_token'])
cat_rec = nusc.get('category', inst_rec['category_token'])
print(catname == cat_rec['name'])
True
The sample_data table has "channel" and "sensor_modality" shortcuts:
# Shortcut
channel = nusc.sample_data[0]['channel']
# No shortcut
sd_rec = nusc.sample_data[0]
cs_record = nusc.get('calibrated_sensor', sd_rec['calibrated_sensor_token'])
sensor_record = nusc.get('sensor', cs_record['sensor_token'])
print(channel == sensor_record['channel'])
True
Data Visualizations¶
We provide list and rendering methods. These are meant both as convenience methods during development, and as tutorials for building your own visualization methods. They are implemented in the NuScenesExplorer class, with shortcuts through the NuScenes class itself.
List methods¶
There are three list methods available.
list_categories()lists all categories, counts and statistics of width/length/height in meters and aspect ratio.
nusc.list_categories()
Category stats for split v1.0-mini: human.pedestrian.adult n= 4765, width= 0.68±0.11, len= 0.73±0.17, height= 1.76±0.12, lw_aspect= 1.08±0.23 human.pedestrian.child n= 46, width= 0.46±0.08, len= 0.45±0.09, height= 1.37±0.06, lw_aspect= 0.97±0.05 human.pedestrian.constructi n= 193, width= 0.69±0.07, len= 0.74±0.12, height= 1.78±0.05, lw_aspect= 1.07±0.16 human.pedestrian.personal_m n= 25, width= 0.83±0.00, len= 1.28±0.00, height= 1.87±0.00, lw_aspect= 1.55±0.00 human.pedestrian.police_off n= 11, width= 0.59±0.00, len= 0.47±0.00, height= 1.81±0.00, lw_aspect= 0.80±0.00 movable_object.barrier n= 2323, width= 2.32±0.49, len= 0.61±0.11, height= 1.06±0.10, lw_aspect= 0.28±0.09 movable_object.debris n= 13, width= 0.43±0.00, len= 1.43±0.00, height= 0.46±0.00, lw_aspect= 3.35±0.00 movable_object.pushable_pul n= 82, width= 0.51±0.06, len= 0.79±0.10, height= 1.04±0.20, lw_aspect= 1.55±0.18 movable_object.trafficcone n= 1378, width= 0.47±0.14, len= 0.45±0.07, height= 0.78±0.13, lw_aspect= 0.99±0.12 static_object.bicycle_rack n= 54, width= 2.67±1.46, len=10.09±6.19, height= 1.40±0.00, lw_aspect= 5.97±4.02 vehicle.bicycle n= 243, width= 0.64±0.12, len= 1.82±0.14, height= 1.39±0.34, lw_aspect= 2.94±0.41 vehicle.bus.bendy n= 57, width= 2.83±0.09, len= 9.23±0.33, height= 3.32±0.07, lw_aspect= 3.27±0.22 vehicle.bus.rigid n= 353, width= 2.95±0.26, len=11.46±1.79, height= 3.80±0.62, lw_aspect= 3.88±0.57 vehicle.car n= 7619, width= 1.92±0.16, len= 4.62±0.36, height= 1.69±0.21, lw_aspect= 2.41±0.18 vehicle.construction n= 196, width= 2.58±0.35, len= 5.57±1.57, height= 2.38±0.33, lw_aspect= 2.18±0.62 vehicle.motorcycle n= 471, width= 0.68±0.21, len= 1.95±0.38, height= 1.47±0.20, lw_aspect= 3.00±0.62 vehicle.trailer n= 60, width= 2.28±0.08, len=10.14±5.69, height= 3.71±0.27, lw_aspect= 4.37±2.41 vehicle.truck n= 649, width= 2.35±0.34, len= 6.50±1.56, height= 2.62±0.68, lw_aspect= 2.75±0.37
list_attributes()lists all attributes and counts.
nusc.list_attributes()
cycle.with_rider: 305 cycle.without_rider: 434 pedestrian.moving: 3875 pedestrian.sitting_lying_down: 111 pedestrian.standing: 1029 vehicle.moving: 2715 vehicle.parked: 4674 vehicle.stopped: 1545
list_scenes()lists all scenes in the loaded DB.
nusc.list_scenes()
scene-0061, Parked truck, construction, intersectio... [18-07-24 03:28:47] 19s, singapore-onenorth, #anns:4622 scene-0103, Many peds right, wait for turning car, ... [18-08-01 19:26:43] 19s, boston-seaport, #anns:2046 scene-0655, Parking lot, parked cars, jaywalker, be... [18-08-27 15:51:32] 20s, boston-seaport, #anns:2332 scene-0553, Wait at intersection, bicycle, large tr... [18-08-28 20:48:16] 20s, boston-seaport, #anns:1950 scene-0757, Arrive at busy intersection, bus, wait ... [18-08-30 19:25:08] 20s, boston-seaport, #anns:592 scene-0796, Scooter, peds on sidewalk, bus, cars, t... [18-10-02 02:52:24] 20s, singapore-queensto, #anns:708 scene-0916, Parking lot, bicycle rack, parked bicyc... [18-10-08 07:37:13] 20s, singapore-queensto, #anns:2387 scene-1077, Night, big street, bus stop, high speed... [18-11-21 11:39:27] 20s, singapore-hollandv, #anns:890 scene-1094, Night, after rain, many peds, PMD, ped ... [18-11-21 11:47:27] 19s, singapore-hollandv, #anns:1762 scene-1100, Night, peds in sidewalk, peds cross cro... [18-11-21 11:49:47] 19s, singapore-hollandv, #anns:935
Render¶
First, let's plot a lidar point cloud in an image. Lidar allows us to accurately map the surroundings in 3D.
my_sample = nusc.sample[10]
nusc.render_pointcloud_in_image(my_sample['token'], pointsensor_channel='LIDAR_TOP')
/home/blp/.local/lib/python3.8/site-packages/nuscenes/nuscenes.py:1028: MatplotlibDeprecationWarning: The set_window_title function was deprecated in Matplotlib 3.4 and will be removed two minor releases later. Use manager.set_window_title or GUI-specific methods instead. fig.canvas.set_window_title(sample_token)

In the previous image the colors indicate the distance from the ego vehicle to each lidar point. We can also render the lidar intensity. In the following image the traffic sign ahead of us is highly reflective (yellow) and the dark vehicle on the right has low reflectivity (purple).
nusc.render_pointcloud_in_image(my_sample['token'], pointsensor_channel='LIDAR_TOP', render_intensity=True)

Second, let's plot the radar point cloud for the same image. Radar is less dense than lidar, but has a much larger range.
nusc.render_pointcloud_in_image(my_sample['token'], pointsensor_channel='RADAR_FRONT')

We can also plot all annotations across all sample data for that sample. Note how for radar we also plot the velocity vectors of moving objects. Some velocity vectors are outliers, which can be filtered using the settings in RadarPointCloud.from_file()
my_sample = nusc.sample[20]
# The rendering command below is commented out because it may crash in notebooks
# nusc.render_sample(my_sample['token'])
Or if we only want to render a particular sensor, we can specify that.
nusc.render_sample_data(my_sample['data']['CAM_FRONT'])

Additionally we can aggregate the point clouds from multiple sweeps to get a denser point cloud.
nusc.render_sample_data(my_sample['data']['LIDAR_TOP'], nsweeps=5, underlay_map=True)
nusc.render_sample_data(my_sample['data']['RADAR_FRONT'], nsweeps=5, underlay_map=True)


In the radar plot above we only see very confident radar returns from two vehicles. This is due to the filter settings defined in the file nuscenes/utils/data_classes.py. If instead we want to disable all filters and render all returns, we can use the disable_filters() function. This returns a denser point cloud, but with many returns from background objects. To return to the default settings, simply call default_filters().
from nuscenes.utils.data_classes import RadarPointCloud
RadarPointCloud.disable_filters()
nusc.render_sample_data(my_sample['data']['RADAR_FRONT'], nsweeps=5, underlay_map=True)
RadarPointCloud.default_filters()

We can even render a specific annotation.
nusc.render_annotation(my_sample['anns'][22])

Finally, we can render a full scene as a video. There are two options here:
- nusc.render_scene_channel() renders the video for a particular channel. (HIT ESC to exit)
- nusc.render_scene() renders the video for all camera channels.
NOTE: These methods use OpenCV for rendering, which doesn't always play nice with IPython Notebooks. If you experience any issues please run these lines from the command line.
Let's grab scene 0061, it is nice and dense.
my_scene_token = nusc.field2token('scene', 'name', 'scene-0061')[0]
# The rendering command below is commented out because it may crash in notebooks
# nusc.render_scene_channel(my_scene_token, 'CAM_FRONT')
There is also a method nusc.render_scene() which renders the video for all camera channels. This requires a high-res monitor, and is also best run outside this notebook.
# The rendering command below is commented out because it may crash in notebooks
# nusc.render_scene(my_scene_token)
Finally, let us visualize all scenes on the map for a particular location.
nusc.render_egoposes_on_map(log_location='singapore-onenorth')
100%|██████████| 1/1 [00:00<00:00, 375.50it/s]
Adding ego poses to map... Creating plot...
